Description
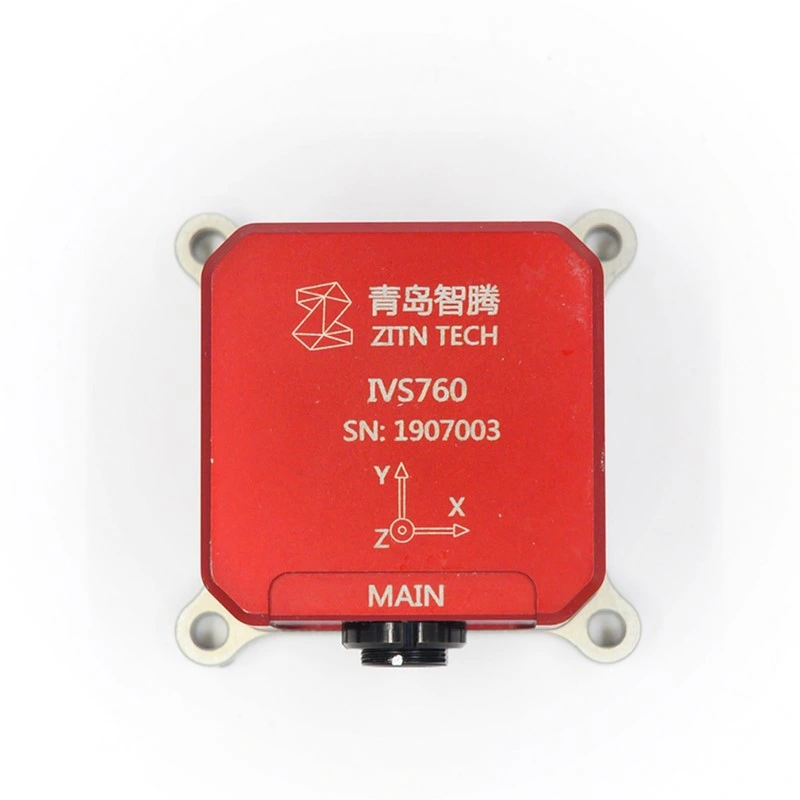
GINS200 Rugged GNSS Aided Integriertes Navigationssystem
Hauptmerkmale
- Low Cost MEMS Inertial System mit GPS/BD2
Dual-Mode-Satellitennavigationssystem
- hohe Genauigkeit: Gierwinkel: 0,5 Grad (RMS), Einstellung: 0,3 Grad (RMS),
Geschwindigkeit <0,15m/s, Position < 5m (eff)
- mehrere Schnittstellen: RS422 / RS232 / TTL
- Hohe Zuverlässigkeit, Starke Vibrationsfest
- kleine Größe: 50 × 51,5× 30mm, <100grams
- Breite Betriebstemperatur: -40~+80 C.
Kurze Einführung
GINS200 Low Cost GNSS/INS Integrated Navigation System übernimmt MEMS Inertial Komponenten und
Integriert GPS/BD Satelliten-Navigationssystem.GINS200 hat spezielle SkyMEMS neu integriert Navigation
Fusion-Algorithmus, der eine hohe Empfindlichkeit Tracking und genaue Positionierung in rauen Umgebungen realisieren kann.
Das System ist klein, leicht, kostengünstig und mit geringem Stromverbrauch, schneller Inbetriebnahme und hohem Energieverbrauch
Zuverlässigkeit. Es ist weit verbreitet in unbemannten Flugzeugen, Fahrzeugnavigation, die Oberfläche Handwerk, Schiff und so weiter.
Technische Daten
|
Parameter |
Wert |
|
Steuerkursgenauigkeit |
L1/B1 Einzelpunkt |
0,5 Grad (eff) |
|
Magnetisch |
1 Grad (eff) |
|
Einstellung |
Roll-/Pitch-Genauigkeit |
<0,3 Grad (RMS) |
|
Geschwindigkeit |
Geschwindigkeitsgenauigkeit |
<0,15m/s (RMS) |
|
Position |
Positionsgenauigkeit |
<5m (RMS) |
|
Gyroskop |
Bereich |
±300/s (ODM unterstützt) |
|
Bias-Stabilität |
≤8/h (normale Temperatur, allan Variance) |
|
Nichtlinearität |
0,0005 |
|
Bandbreite |
50Hz |
|
Beschleunigungsmesser |
Bereich |
±2g ~ ±20g |
|
Bias-Stabilität |
≤5mg |
|
Zufälliger Spaziergang |
≤20µg (normale Temperatur, allan Variance) |
|
Nichtlinearität |
0,0005 |
|
Empfänger |
Arbeitsmodus |
BD2 B1/GPS L1 |
|
Kaltstart |
60s |
|
Warmstart |
10s |
|
Elektrische Daten |
Stromversorgung |
9~36VDC |
|
Stromverbrauch |
≤2,5W |
|
Startzeit |
3S |
|
Elektrische Schnittstelle |
RS422 / RS232 / TTL |
|
Aktualisierungsrate der Daten |
IMU: 100~400Hz; Einstellung: 100Hz |
|
Umgebungsbedingungen |
Betriebstemperatur |
-40+80~ C |
|
Lagertemperatur |
-40+85~ C |
|
Vibrationen |
6,06g (eff) |
|
Schock |
9G/11 ms, 1000g/1ms |
|
Physikalische Eigenschaften |
Größe |
50 × 51,5× 30mm |
|
Gewicht |
≤100g |
Typische Anwendungen
- unbemannte Flugzeuge
- Fahrzeugnavigation
- Oberflächenfertigkeit
- Schiff
Herz und schneller Service




 Complaint
Complaint