




 Complaint
Complaint

3000W 72V Electric Scooter Parts Controller Throttle Motor Kit
Packing List
1. 1pcs 72V3000w brushless motor
2. 1pcs 72v 3000w 50A 24MOS Brushless Controller
3. 1pcs throttle
Motor Parameters
| Model | BM1109/MY1020D | |||||||
| Motor Type | Brushless DC Motor | |||||||
| Power | 800W | 1000W | 1200W | 1500W | 1600W | 1800W | 2000W | 3000W |
| Voltage | 36V | 36V/48V | 48V | 48V | 48V | 48V | 60V | 72V |
| No-load Current | ≤4.5A | ≤4.8A/4.2A | ≤5.6A | ≤6.5A | ≤6.8A | ≤7.6A | ≤7.2A | ≤8.8A |
| No-load Speed | 3500RPM | 3500RPM | 4200RPM | 5000RPM | 5000RPM | 5200RPM | 5400RPM | 5800RPM |
| Rated Torque | 2.2N.m | 2.7N.m | 3N.m | 3.75N.m | 4N.m | 4.5N.m | 5N.m | 5.4N.m |
| Rated Current | ≤23A | ≤28/21A | ≤26A | ≤30A | ≤34A | ≤38A | ≤36A | ≤43A |
| Rated Speed | 3100RPM | 3100RPM | 3500RPM | 3750RPM | 3900RPM | 4500RPM | 4600RPM | 4900RPM |
| Efficiency | ≤23% | ≤28/21% | ≤26% | ≤30% | ≤34% | ≤38% | ≤36% | ≤43% |
| Sprocket/Chain | 25H/T8F Sprocket/Chain | |||||||
| Application | Electric Scooter, Mini Electric Motorcycle DIY Engine Kit, Razor Push Scooter, Ebike Bicycle, Go Karts, E-bike, E-Tricycle, Mid Drive Motor Kit, Complete Set, DIY Engine System, etc | |||||||
Controller:
1.Power:3000w
2.Voltage:48-72V DC
3.Current:50A
4.Mosfet:24WF
5.Under Voltage turn the 1.1-3.7V
6.Brake Low Level
Photo Details
Two Mounting Options for motor:
1. With foot 2. Without foot
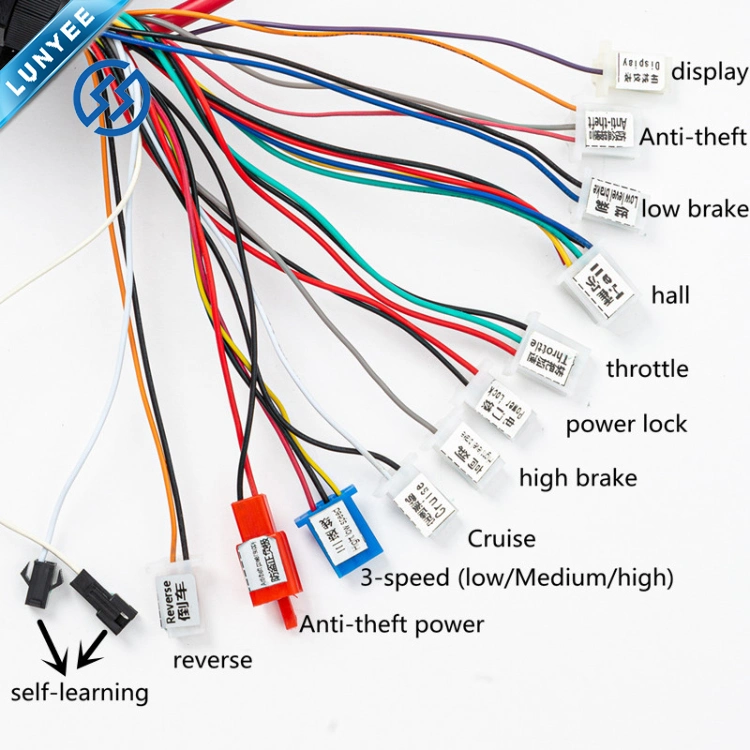
72V 3000W brushless controller function:
1. motor line
2. battery +
3. battery -
4. display line
5. Anti-theft alarm line
6. low brake
7. hall line
8. throttle line
9. power lock line
10. high brake
12. 3-speed line(low/Medium/high)
13. Anti-theft power line
14. reverse line
15. self-learning line
1.contact the motor line
2.contact the hall line
3.contact the throttle line
4.contact the electric lock line
5.contact the battery line(red:+ , black:-)
6.docking the two self-learning lines, twist throttle, the wheel will forward or reverse.
1.if wheel forward ,Separate the self-learning line.
2.if wheel reverse, Separate the self-learning line. then Docking the self-learning line again. if wheel forward ,Separate the self-learning line.
7.other functions can be connected as needed.













