Description
Product Description
1. General description
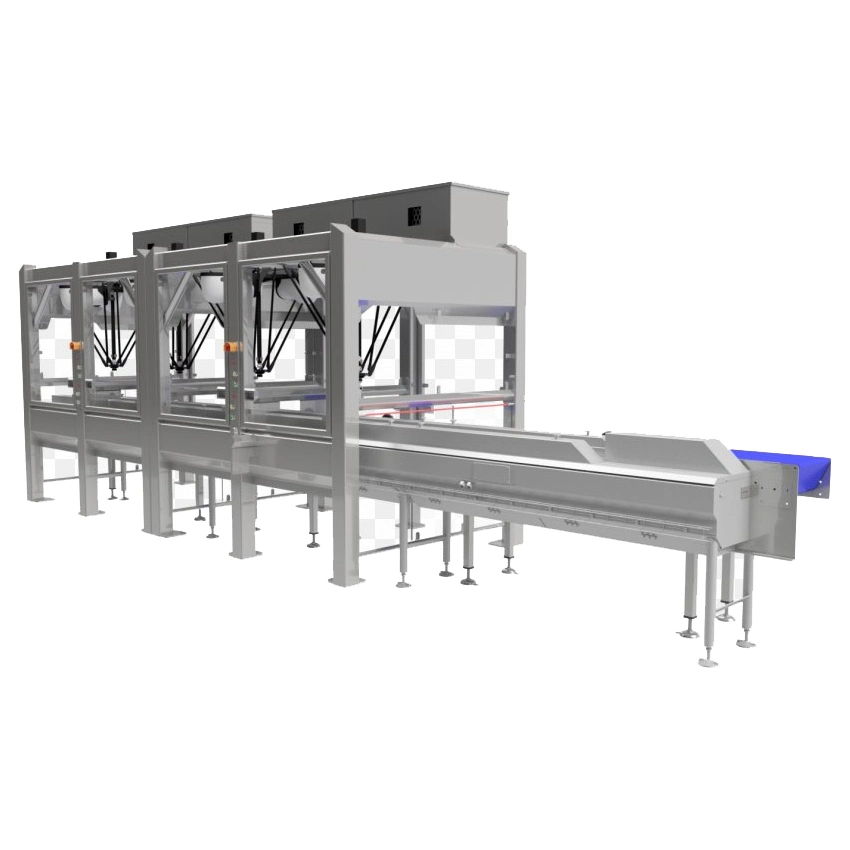
The machine consists of robert,grasper components,bottle splitiing device,case blocking device,case conveyor, bottle guiding device.Working process:the filled bottle after sleeving labels go to bottle spliting device,the robert graspers after decompressing by bottle deviding device and cylinder will grasp the filled bottles above the cases conveyor,meantime,the open case is in the required place,the bottles guiding and packing device will fix the open and empty case,then robert put the filled bottles into the case,the bottles guiding and packing device move up ,and the case blocking device down,the case with filled bottles will leave the station and the machine will do the next circle.
2. The machine structure
1) The bottle grasping device
a) The compressed air (0.15~0.15MPa)make the internal set of pneumatic grasper deform to clamp the bottles,the internal set will recover when exhaust to unlock bottles. The grasper is controlled by electric,accurate and reliable.
2) The Robert
a) Adoption of TrueMove technology to achieve precise machine run by a predetermined trajectory
b) Optimal sports performance with quickMove technology
c) Ensuring the safty of machine and operater with ActiveSafety technology
d) smooth running of time exceeded 70,000 hours with rigorous sealing design
e) Adoption of a high level of protection to adapt to harsh environments
f) With a joint motion to achieve high-speed multi-axis automation, saving energy and reducing consumption
g) Controlled by the servo system to achieve the perfect transition trajectory to reduce the impact of sport
h) Controlled by the servo system to achieve multi- point positioning, save a lot of time to adjust to change
i) Adoption of high-precision gear auxiliary drive to minimize noise to maintain personal safety
3) Tecnical parameters
a) with a variety of protection measures, when the malfuction appears it timely shutdown
i. lack of cases on the case-in chain
ii. lack of bottles on the botlles conveying table
iii. the grasper with botlles doesn't match the case
iv. The operator cross the safe line
3, Tecnical parameters
| Model | RZX24 |
| Robert working rate | 5secs/time |
| Number of grasped case per time | 4×6 case:2case per time |
| Rated capacity | 4×6 case:30000bottles/h |
| Max capacity | 4×6 case:33000bottles/h |
| Grasper | 48 |
| Working mode | bottle-in forward |
| short edge forward |
| Bottle | φ61×230mm |
| Applicable bottle | PET bottle diameterD=Φ50~Φ92mm,height H=185~320mm |
| applicable bottle | case |
| case dimension | 4×6 case:396×246×240mm(L×W×H) |
| Compressed air | air source pressure0.5-0.6 Mpa |
| Working pressure cylinder 0.3-0.6Mpa grasper 0.15-0.2 Mpa |
| Air consumption6 m3/h |
| Power | 6Kw |
| Machine dimension | Effective width of bottle conveying table :880mm |
| Height of conveying table :1200mm |
| width of case conveying channel :280mm |
| Height of case conveying channel :800mm |
| Overall dimension 5939×2650×2950mm |
| Weight | Machine weight 2800Kg |
| Grasper working ability 110Kg |
4, Configuration list
| Code | Name | Remark |
| TNRV040-30-FA1-SS1-B6-0.25-4/1 | Bottle unscrambler reducer | Ucan |
| R37DT80N4/M3/180° | case conveying geared motor | SEW |
| | Air cylinder | SMC/FSTO |
| | Timing belt | Made in China |
| | Pneumatic FRL | SMC/FSTO |
| | air operated reversing valve | SMC/FSTO |
| | Maintenance - free bearings | IGUS |
About Sunswell






 Complaint
Complaint