| Gyro | Dynamic measuring range | Configurable (maximum ± 1000) | | ±450 | | º/s |
| Zero bias instability | Allan variance, better than | | 5.1 | | º/h |
| Zero bias stability | 1s smooth, rms, better than | | 30 | | º/h |
| Zero bias over the full temperature range | -40 ºC ~ 85 ºC, 10s smooth, rms | | 0.03 | | º/s |
| Random walk | 1б | | 0.26 | | º/√h |
| Zero bias repeatability | 1б | | 100 | | º/h |
| Output noise | No filtering, rms | | 0.135 | | º/s |
| Scale factor repeatability | 1б | | 0.1 | | % |
| Scale factor nonlinearity | FS=450 º/s | | 0.01 | | %FS |
| Bandwidth (-3dB) | | | 330 | | Hz |
| Cross coupling | | | 0.1 | | % |
| Accelerometer | Dynamic measuring range | Configurable (maximum ± 40) | | ±18 | | g |
| Zero bias stability | Allan variance | | 0.07 | | mg |
| Zero bias over the full temperature range | -40 ºC ~ 85 ºC, 10s smooth, rms | | 5 | | mg |
| Random walk | 1б | | 0.029 | | m/s/√h |
| Zero bias repeatability | 1б | | 5 | | mg |
| Output noise | No filtering, rms | | 1 | | mg |
| Scale factor repeatability | 1б | | 0.1 | | % |
| Scale factor nonlinearity | FS=10g | | 0.1 | | %FS |
| Bandwidth (-3dB) | | | 330 | | Hz |
| Cross coupling | | | 0.1 | | % |
| Magnetometer | Dynamic measuring range | | | ±2.5 | | gauss |
| Sensitivity | | | 0.1 | | mgauss/LSB |
| Nonlinearity | | | 0.5 | | %FS |
| Barometer | Pressure range | | 300 | | 1100 | mbar |
| Sensitivity | | | 6.1 × 10-7 | | mbar/LSB |
| Total error | | | 4.5 | | mbar |
| Relative error | | | 2.5 | | mbar |
| Nonlinearity | | | 0.1 | | %FS |
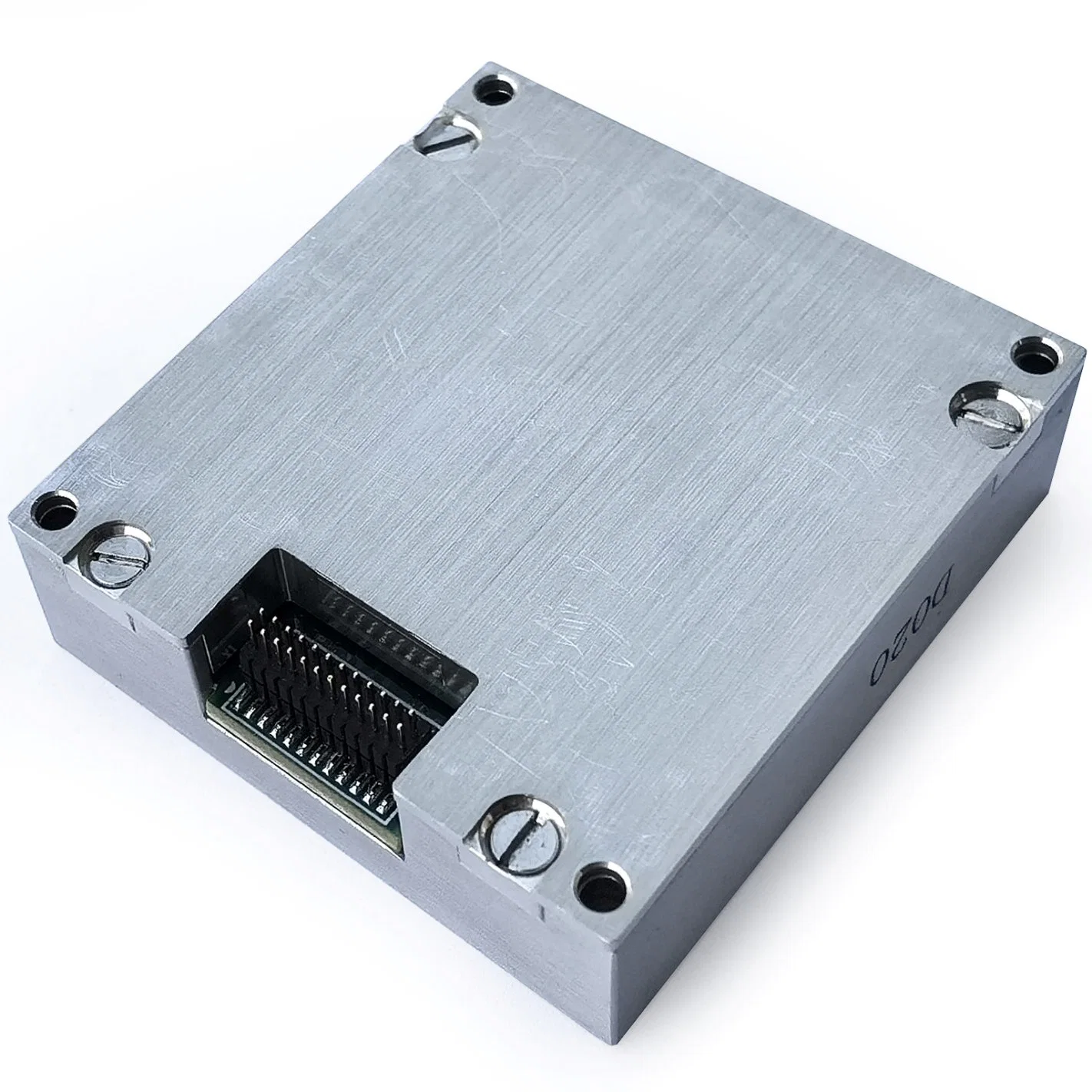
| Communication Interface | 1 spi | Input clock frequency | | | 15 | MHz |
| | | | | | |
| Electrical characteristics | Voltage | DC | 2.5 | 3.3 ± 10% | 5 | V |
| Power consumption | | | 0.6 | 1 | W |
| Ripple | P-P | | | 100 | mV |
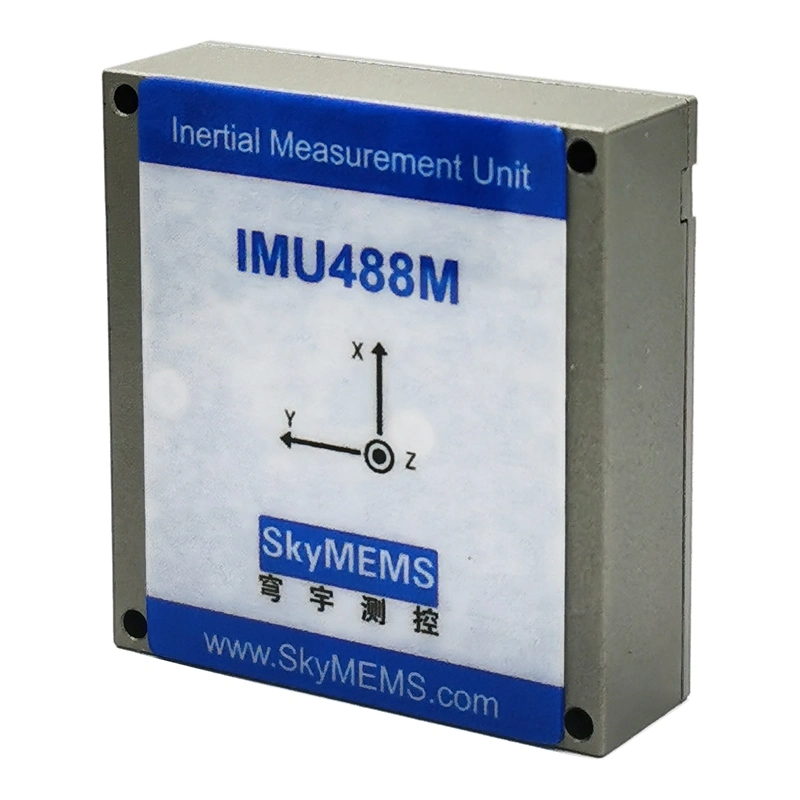
| weight | | | 48±2 | | g |
| Use environment | Operating temperature | Scalable | -40 | | 85 | ºC |
| storage temperature | | -55 | | 85 | ºC |
| vibration | | | 10~2000Hz,6.06g | | |
| Shock | | | 5000g,0.1ms | | |




 Complaint
Complaint