our ndustrial mechanical arm
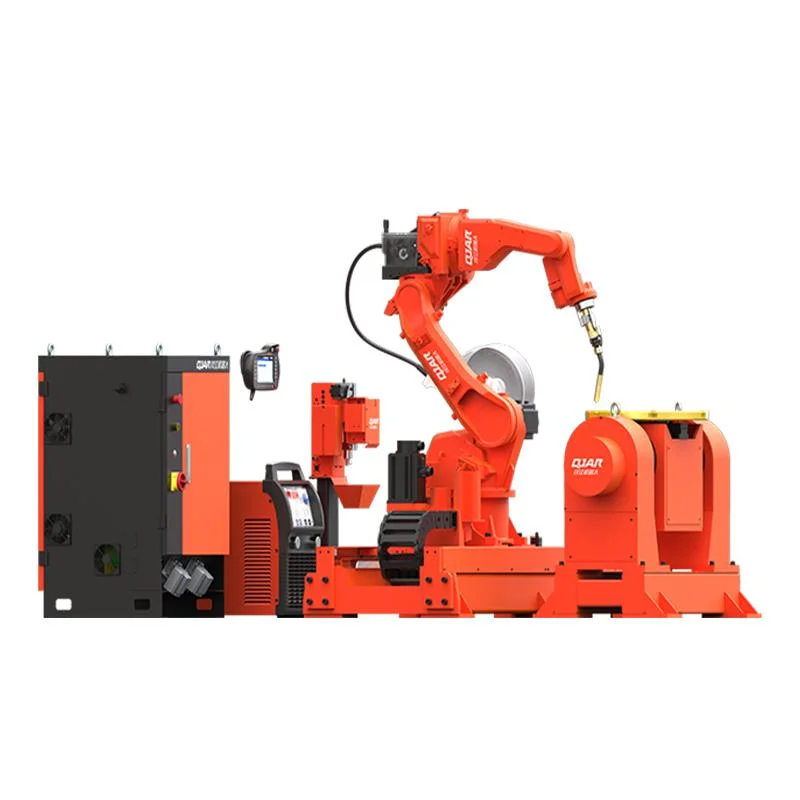
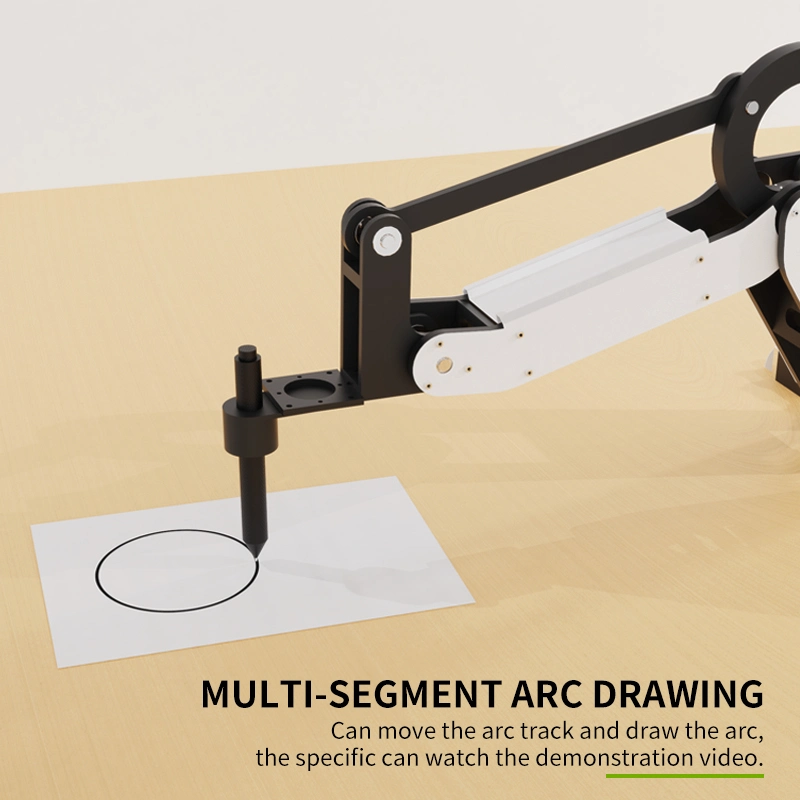
Main function application: Industrial handling, palletizing, loading and unloading, assembly, gluing, Business presentation Writing, drawing and visual coordination can complete: material identification, Defect detection, qualified detection, assembly, etc.





 Complaint
Complaint