Description
Características funcionales
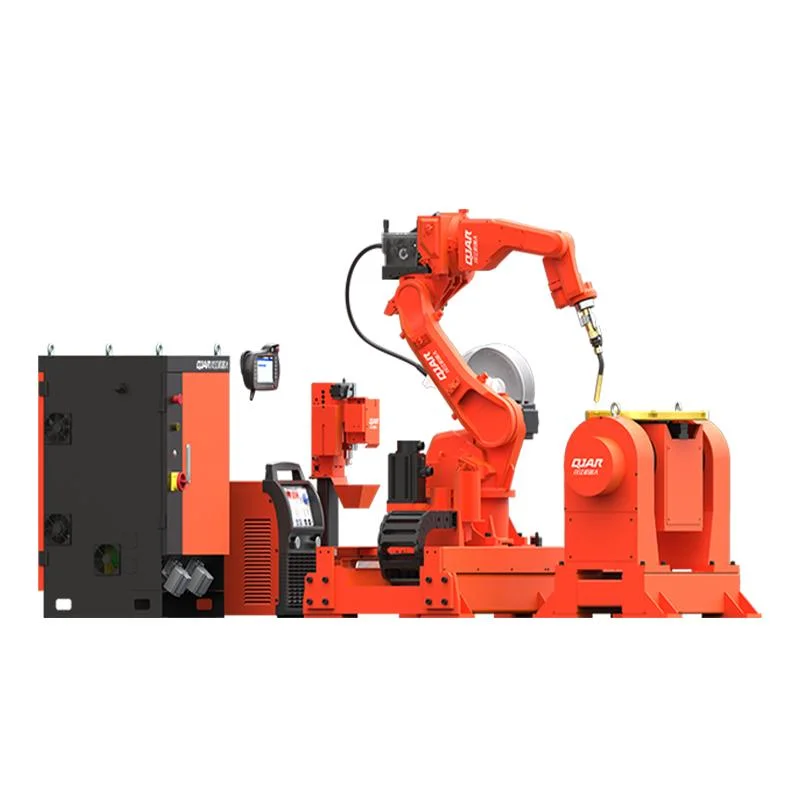
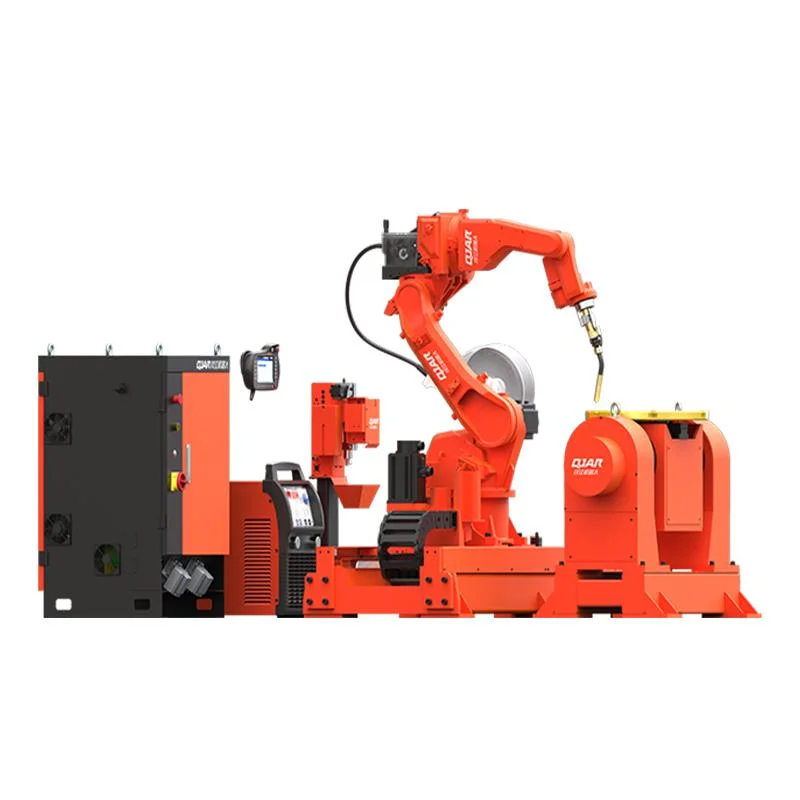
El robot de soldadura CRP-RH20-06-W tiene las siguientes características funcionales:
1)-el brazo es de 2,0 metros. El diseño es muy compacto y puede instalarse de forma flexible en el suelo o al revés.
2)-con un gran espacio de trabajo, una velocidad de funcionamiento rápida y una alta precisión de posicionamiento repetido, es adecuado para una amplia gama de aplicaciones de soldadura.
3)-la placa de parada de emergencia de seguridad independiente del sistema de control está equipada con, y el circuito de relé de seguridad se adopta para proporcionar parada de emergencia de doble circuito para garantizar la fiabilidad de la parada de emergencia.
4)-el cuerpo del robot adopta un cable especial altamente flexible.
5)-transformador trifásico integrado hace 380V y 220V aislados para ayudar a la fuente de alimentación más estable. El filtro trifásico integrado puede mejorar de forma eficaz el rendimiento de EMC y EMI.
6)-el cuerpo del robot está con tubería de gas de doble circuito para satisfacer la demanda de soldadura.
7)-el diámetro interior del orificio central de 6 ejes es 44mm, puede cumplir con los requisitos de instalación de soplete de refrigeración por agua y soplete de fuelle.
8)-cable de soldadura altamente flexible incorporado.
Especificación del producto
|
Modelo |
CRP-RH20-06-W |
|
Forma de brazo |
juntas múltiples verticales de 6 ejes |
|
Carga útil máxima |
6KG |
|
Precisión de posicionamiento repetida |
±0,08mm |
|
Distancia máxima de alcance |
2012mm |
|
Peso del cuerpo del robot |
291 KG |
|
Modo de instalación |
Montaje en tierra, al revés, montaje en pared |
|
Desplazamiento máximo |
eje 1 |
Montaje en suelo/boca abajo-165 °-165°, montaje en pared -30°~30° |
|
eje 2 |
-155°~100° |
|
eje 3 |
-165°~245° |
|
eje 4 |
-190°~190° |
|
eje 5 |
-105°~100° |
|
eje 6 |
-210°~210° |
|
Velocidad máxima |
eje 1 |
160°/S |
|
eje 2 |
160°/S |
|
eje 3 |
169°/S |
|
eje 4 |
301°/S |
|
eje 5 |
338°/S |
|
eje 6 |
535°/S |
|
Par admisible |
eje 4 |
16N.m |
|
eje 5 |
16N.m |
|
eje 6 |
13N.m |
|
Momento de inercia permitido |
eje 4 |
0,55kg.m2 |
|
eje 5 |
0,55kg.m2 |
|
eje 6 |
0,2kg.m2 |
|
Entorno de instalación |
temperatura ambiente |
0~45°C |
|
humedad relativa |
20-80% (sin condensación) |
|
vibración |
Menos de 0,5 C. |
|
otros |
La instalación del robot debe estar alejada de: Gases licuados inflamables o corrosivos, fuentes eléctricas de interferencia |
|
Nivel de IP |
Cuerpo 1P54, muñeca IP67 |
|
Ventajas |
Estructura compacta, alta velocidad, alta precisión, alta capacidad de ampliación y fácil funcionamiento |
|
Aplicación |
Soldadura, corte, montaje, manipulación, marcado, molienda |
Características de la aplicación
|
La aplicación de soldadura de acero inoxidable tiene las siguientes características:
1)-el robot se mueve suavemente, la velocidad final es consistente con la velocidad de soldadura establecida y la soldadura es estable y con buena forma.
2)-el robot y soldadora adoptan un control de comunicación digital completo, para que se pueda ejercer la mejor eficacia de soldadura y el mejor efecto de soldadura.
3)-el robot y soldadora adoptan una comunicación digital completa que es rápida y estable.
4)-soldadora de pulso único/doble que logra la soldadura de baja dispersión en el rango de corriente completo.
5)-tiene tecnología de pulso de arco corto, que ayuda a la velocidad de soldadura ser más rápida.
6)-tiene control dinámico de energía de onda de alta frecuencia, que logra una alta penetración de soldadura, baja entrada de calor y patrón de escala de peces bien reconocible.
7)-la alimentación de hilo tiene retroalimentación de encoder que es más estable y tiene fuerte anti-interferencia.
8)-función de posicionamiento integrada
9)-el soplete de soldadura por impulsos genera una gran cantidad de calor, y es necesario configurar un soplete de refrigeración por agua cuando se está soldando con corriente grande.
10)-Hollow 500A soplete de soldadura de refrigeración por agua que soporta soldadura de alta corriente a largo plazo. |
Fotos de aplicación
Perfil de la empresa
Lista de productos
Nuestra fábrica
Exposiciones






 Complaint
Complaint