


 Complaint
Complaint

Introducción al producto
Este módulo de unión de robots de la serie eRob es un producto de módulo de unión estandarizado basado en nuestros propios servoaccionamientos y codificadores absolutos basados en años de experiencia al servicio de los clientes, lo que hace que el desarrollo de robots sea más fácil, más rápido y más seguro.Características del producto
| Modelo | eRob142H | ||||
| Relación-reductor armónica | SHG 32-50 | SHG 32-80 | SHG 32-100 | SHG 32-120 | |
| Par máximo de arranque-parada(N.m) | 281 | 395 | 433 | 459 | |
| Par nominal (N.m) | 99 | 153 | 178 | 178 | |
| Par máximo admisible momentáneo (N.m) | 497 | 738 | 841 | 892 | |
| Velocidad máxima de salida (RPM) | 40 | 25 | 20 | 16,7 | |
| Potencia del motor (W) | 1000 | ||||
| Corriente nominal (A) | 26 | ||||
| Corriente máxima (A) | 56 | ||||
| Sin modelo de freno | Inercia del rotor(g.mm²) | 1244894 | |||
| Diámetro exterior x longitud (mm) | 142 x 133,9 | ||||
| Peso (kg) | 6,49 | ||||
| Con modelo de freno | Inercia del rotor(g.mm²) | 1273287 | |||
| Diámetro exterior x longitud (mm) | 142 x 133,9 | ||||
| Peso (kg) | 6,7 | ||||
| Parámetro común | Tensión de alimentación: 48V (±10%), diámetro de orificio pasante: 18mm, clase IP: IP54, tipo de freno: Freno de fricción | ||||
| Configuración de ensamblaje opcional | Modo de comunicación: EtherCAT/CANopen/Modbus, resolución del codificador de salida: 19/20bit, precisión de posicionamiento de repetición/absoluta: ±7/±15 arcosegundos o ±10/±25 arcosegundos | ||||
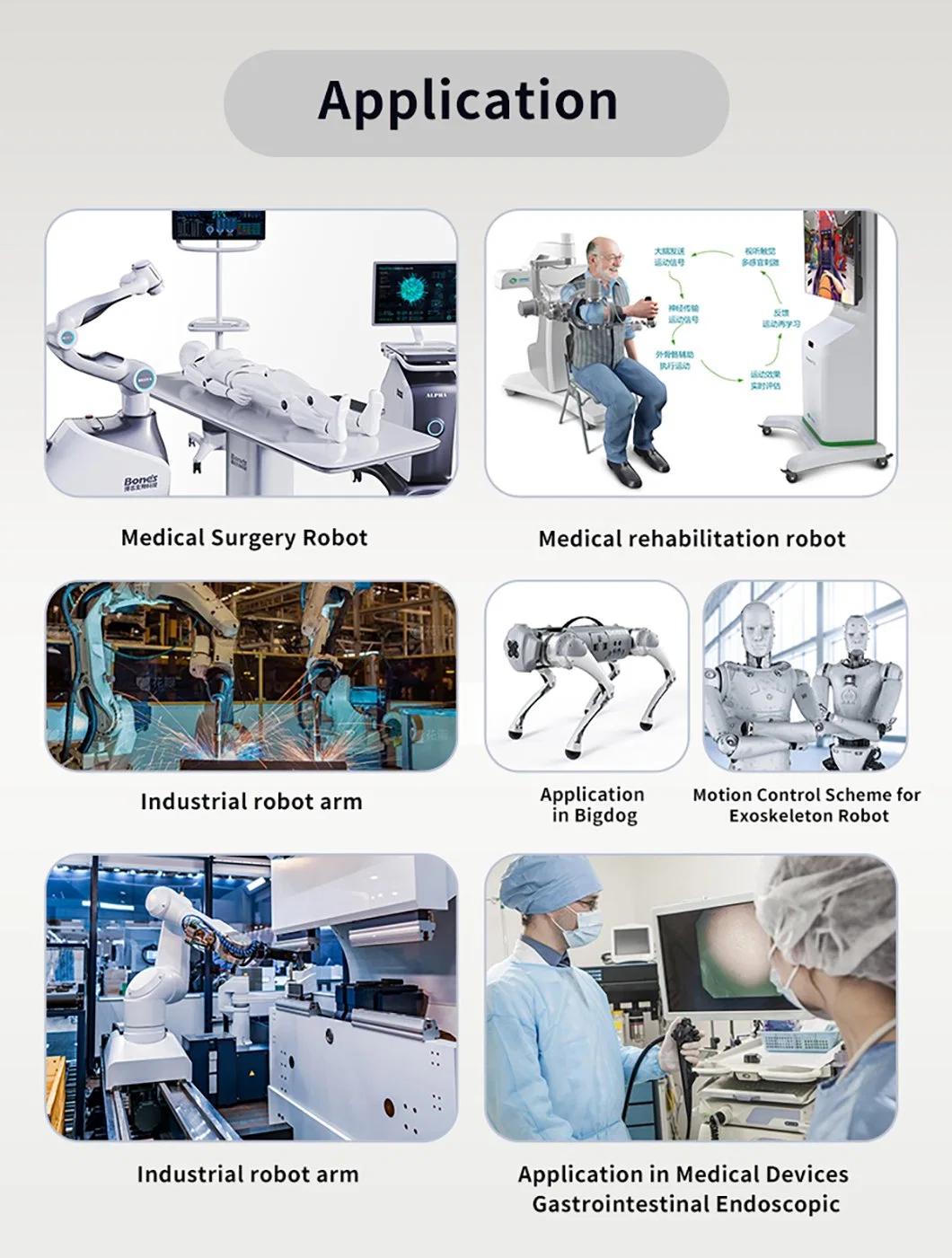
Aplicación del módulo de junta del robot de la serie eRob
Este tipo de junta de robot m Contodules podría ser utilizado para Motionrol Scheme para Exoesqueleto Robot, dispositivos médicos Endoscópica gastrointestinal, Robot de rehabilitación médica, bigdog, brazo de robot industrial, robot de soldadura, etc.Zhengzhou defy Mechanical&Electrical Equipment Co., Ltd es un fabricante profesional de Robótica Joint Module. Nuestra fábrica se dedica a la investigación del motor de la junta del robot desde 2010s, más de 10 años de experiencia hace que nuestro producto de calidad de rango en la posición de líder en China. Con una producción anual de 500.000 juegos de varios productos para el mercado, con alta precisión y rendimiento estable, nuestros módulos conjuntos robóticos son recibidos por clientes de la India, Tailandia, Irán, Corea del Sur, Federación de Rusia, SUECIA, Irlanda, Polonia, EE.UU., Francia, etc.
P: ¿es usted empresa comercial o fabricante?
R: Somos fabricante y empresa comercial.
P: ¿Puedo tener un pedido de muestra?
R: Sí, damos la bienvenida a la orden de muestra para probar y comprobar la calidad.
P: ¿Cuánto tiempo dura tu hora de entrega?
R: Debido al complejo proceso, la producción tarda 8-10 días hábiles. Para artículos personalizados, por favor consulte con nosotros antes de hacer el pedido.
P. ¿Cómo se envían los bienes y cuánto tiempo tarda en llegar?
R: Por lo general por vía rápida, como DHL, UPS, FedEx, EMS o TNT; Por aire y por mar también están disponibles.
La llegada rápida tarda 3-15 días.
P: ¿Cuál es tu condiciones de pago?
R: Aceptamos Trade Assurance Order, TT, Paypal, West Union y L/C.