 Complaint
Complaint

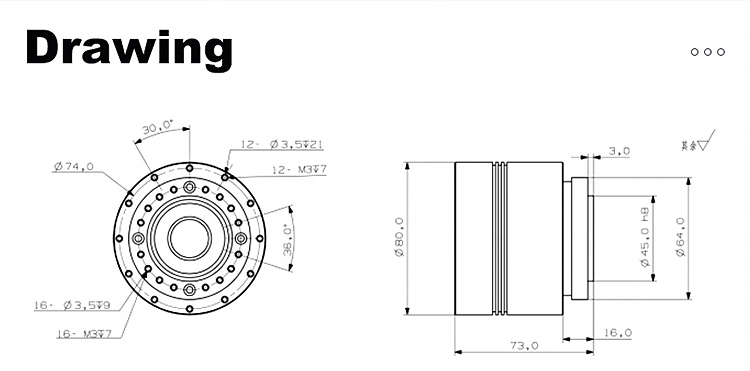
El servomotor del actuador de la junta del robot de tamaño pequeño OD 80mmse utiliza principalmente para el brazo del robot, el reductor armónico integrado, el codificador, el motor de cc y el controlador. El servomotor de la junta del robot podría usarse directamente en la junta del brazo del robot, ayudando a construir juntas del robot rápidamente.
1. Aísle la comunicación CANopen de acuerdo con la especificación CiA301 v4,2.0
A. APOYO SDO, TPDO, RPDO.
B. modo de velocidad de soporte, modo de posición (modo de contorno, modo de interpolación)
C. apoyar la producción y el consumo de latidos cardíacos
15. codificador absoluto de 2 bits, un pulso de vuelta hasta 32768.
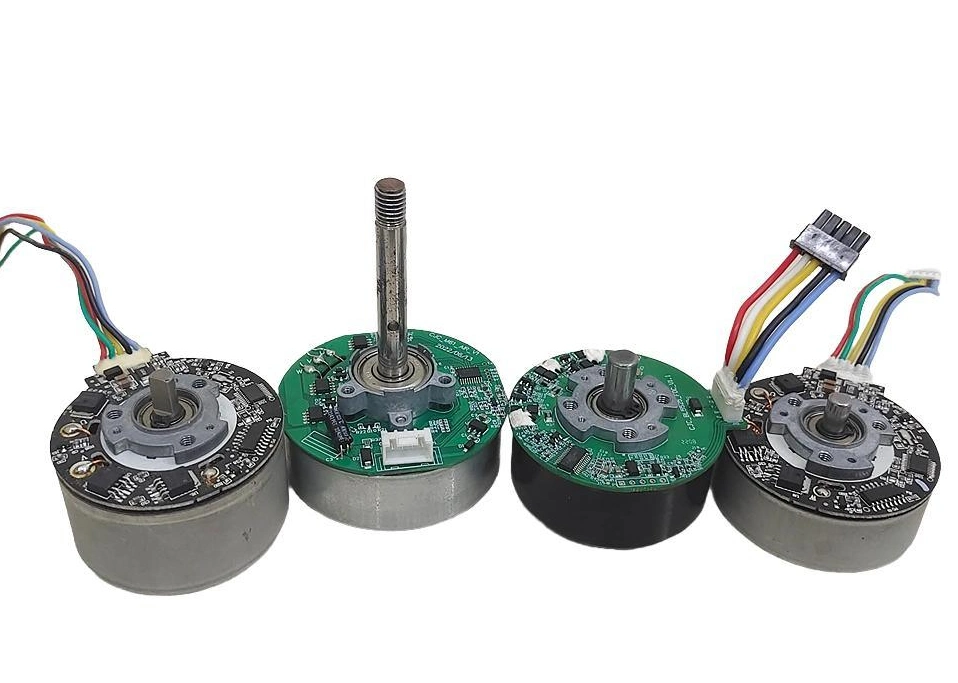
3. Estructura de motor DD multietapa, gran potencia de par.
4. Reductor armónico, motor, controlador y codificador integrados.
5. Bajo ruido, baja vibración, posicionamiento de alta velocidad, alta fiabilidad.
6. Control vectorial orientado al campo FOC, posición de soporte / velocidad bucle cerrado.
7. Puede funcionar a cero histéresis dado estado de pulso, después de cero histéresis.
8. características de la caja electrónica de 16 bits.
9. Se proporciona un calculador CANopen superior, que puede controlar el estado del motor y modificar los parámetros.
10. Modo de posición, impulso de soporte + señal de dirección, codificador a seguir.
11. Modo de velocidad, soporta regulación de velocidad de señal de ciclo de trabajo PWM
12. Tiene la función de bloquear la rotación, protección contra sobrecorriente y protección contra sobretensión.
13. Valor absoluto de bajo consumo de energía y multivuelta
A. la versión de comunicación servo 485/CAN todo en uno puede añadir función multivuelve.
B. cuando el motor está encendido, hay un circuito de carga en el interior para cargar la batería. Cuando el motor está apagado, el consumo de corriente de la batería es de solo 0,07mA.
C. después de que el motor no tenga alimentación eléctrica, el eje del motor se acciona para girar para activar el codificador y continuar memorizando la posición.
D. intervalo de memoria de varias vueltas -60000 ~ 60000 vueltas.
E. ajuste simple del origen, puede ser establecido como el origen en cualquier posición.
F. múltiples métodos de retorno cero: Retorno cero de comunicación, retorno cero automático en el encendido, y salida de señal de punto cero.
G. Protección contra errores: Alarma de fallo de alimentación de la batería.
Altamente integrado Este modelo de módulo de junta robótica integra motor dc, controlador, codificador y reductor armónico. | |
SOPORTA SDO TPDO RPDO Proporcionar software de ordenador host CANopen que pueda supervisar el estado del motor y modificar los parámetros. | |
Modo de posición Este modelo de módulos de junta robótica soporta Pulse + dirección codificador de señal seguir | |
| Modo de control de velocidad de ciclo de trabajo PWM | |
Comunicación CANopen aislada
Fuente de alimentación aislada integrada Menor consumo de energía, valor absoluto multivuelta, batería integrada
Carga automática |
Parámetro del motor de junta del robot de la serie M.
| Parámetro de modelo | M8010E17B50L | M8010E17B80L | M8010E17B100L | ||
| Parámetro general | Tensión nominal del motor | 36VDC±10% | 36VDC±10% | 36VDC±10% | |
| Corriente nominal del motor | 3,5A | 3,5A | 3,5A | ||
| Par de salida después de la desaceleración | 34NM | 35NM | 51NM | ||
| Peso | 1KG | 1KG | 1KG | ||
| Gama de velocidades tras la desaceleración | 0~30RPM | 0~18RPM | 0~18RPM | ||
| Parámetro reductor | Relación de reducción | 50 | 80 | 100 | |
| Par nominal de salida | 34NM | 35NM | 51NM | ||
| Par máximo de arranque-parada | 44NM | 56NM | 70NM | ||
| Retroceso | Menos de 20 segundos de arco | Menos de 20 segundos de arco | Menos de 20 segundos de arco | ||
| Vida de diseño | 8500hour | 8500hour | 8500hour | ||
| Parámetro del motor | Par de apriete | 1NM | 1NM | 1NM | |
| Velocidad nominal | 1500RPM | 1500RPM | 1500RPM | ||
| Velocidad de rotación máxima | 2000RPM | 2000RPM | 2000RPM | ||
| Potencia | 100W | 100W | 100W | ||
| Resistencia | 0,86 | 0,86 | 0,86 | ||
| Inductancia | 0,8mh | 0,8mh | 0,8mh | ||
| Inercia giratoria | 0,69x10-4 | 0,69x10-4 | 0,69x10-4 | ||
| KG / M2 | KG / M2 | KG / M2 | |||
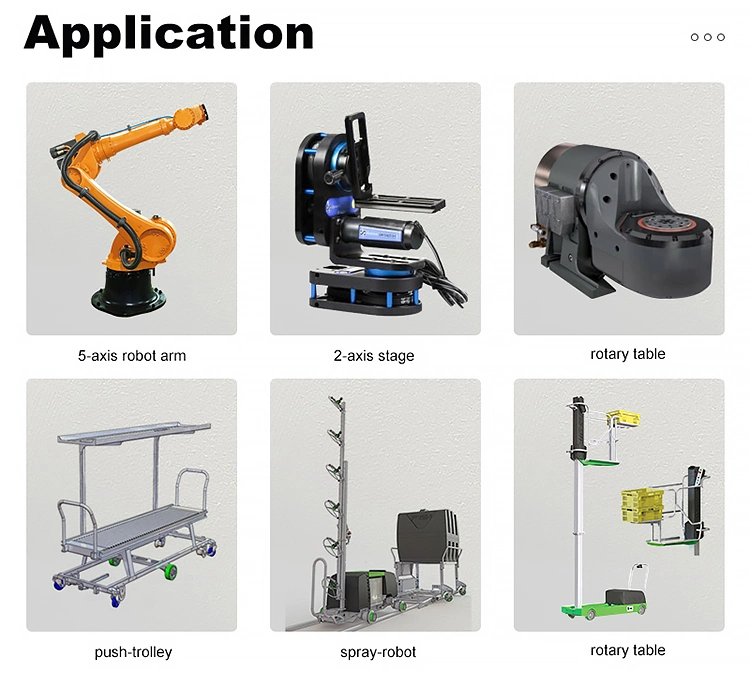
Con diseño modular, módulo de junta compacto, su peso, tamaño, modo de instalación, lámpara de aspecto en comparación con los productos tradicionales han hecho una considerable optimización, principalmente utilizado en la cooperación robotand y el robot ligero, puede cumplir con el
Miniaturización, ligero, modular necesidades en gran medida.también puede ser ampliamente utilizado en robots industriales, robots de servicio, equipos de automatización industrial, equipos de torno y etc
Zhengzhou defy Mechanical&Electrical Equipment Co., Ltd es un fabricante profesional de Robótica Joint Module. Nuestra fábrica se dedica a la investigación de reductor armónico y motor de unión de robot desde 2010s, más de 10 años de experiencia hace que nuestro producto de calidad de rango en la posición de líder en China. Con una producción anual de 10, 000 juegos de varios productos para el mercado, con alta precisión y rendimiento estable, nuestros módulos conjuntos robóticos son recibidos por clientes de la India, Tailandia, LRAN, Corea del Sur, Federación de Rusia, SUECIA, Irlanda, Polonia, EE.UU., Canadá, Francia y así sucesivamente.
1. Aceptamos un pequeño orden de módulos de junta de robot;
2. El orden de la muestra de los módulos de unión del robot es en 10 días, el plazo de entrega del pedido de la cantidad de masa es de 7-15 días;
3. Podemos aceptar el pago vía paypal, T/T y L/C;
4.la garantía de calidad de nuestros módulos de unión de robots es de 1 años, y podemos proporcionarle asistencia técnica profesional;
5. Proporcionamos formación gratuita sobre el uso de los módulos de unión de robots. Los ingenieros están disponibles para el soporte técnico.
P: ¿es usted empresa comercial o fabricante?
R: Somos fabricante y empresa comercial.
P: ¿Puedo tener un pedido de muestra?
R: Sí, damos la bienvenida a la orden de muestra para probar y comprobar la calidad.
P: ¿Cuánto tiempo dura su entrega?
R: Debido al complejo proceso, la producción tarda 8-10 días hábiles. Para artículos personalizados, por favor consulte con nosotros antes de hacer el pedido.
P. ¿Cómo se envían los bienes y cuánto tiempo tarda en llegar?
R: Por lo general por vía rápida, como DHL, UPS, FedEx, EMS o TNT; Por aire y por mar también están disponibles.
La llegada rápida tarda 3-15 días.
P: ¿Cuáles son sus condiciones de pago?
R: Aceptamos Trade Assurance Order, TT, Paypal, West Union y L/C.