Description
Características funcionales
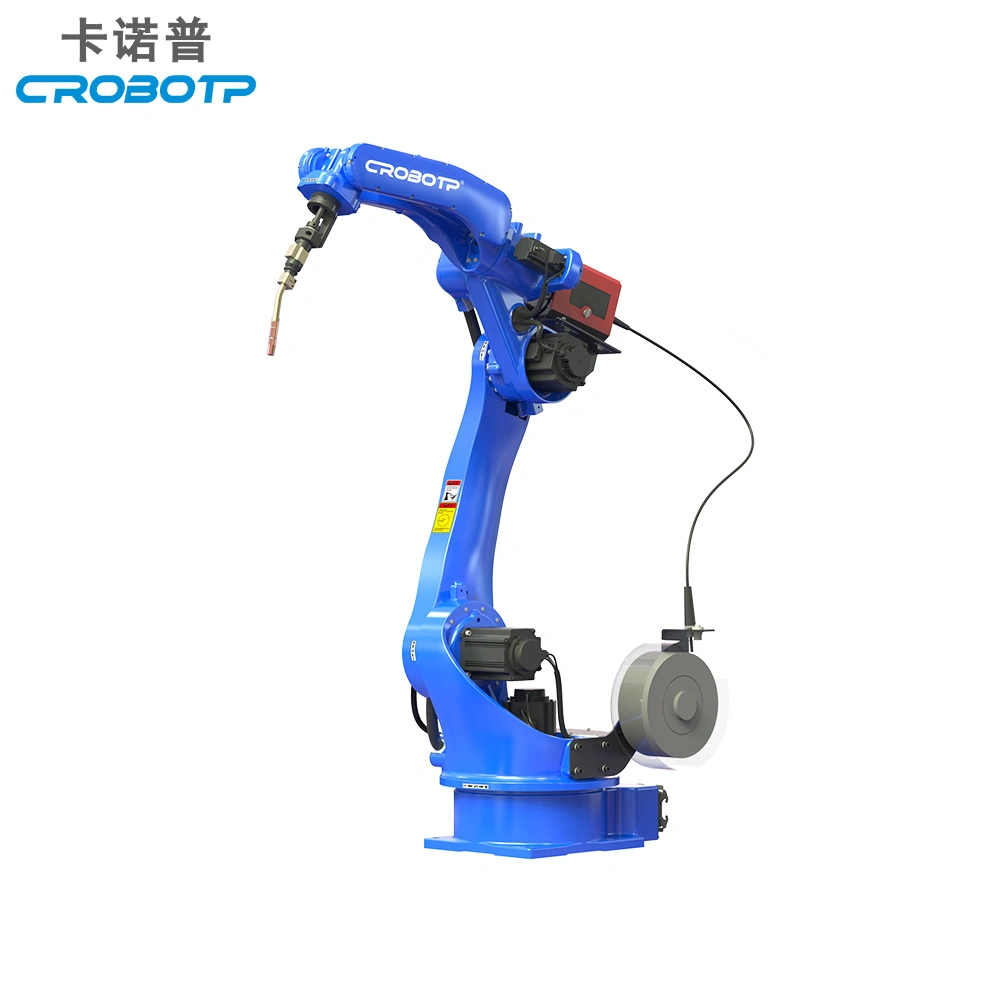
El CRP-RH18-20-W del robot de soldadura tiene por debajo de las características funcionales:
1)-El brazo span es casi 1,8 metros. El diseño es muy compacto y flexible puede ser instalado en el suelo o al revés.
2)-Con un gran espacio de trabajo, de forma rápida velocidad de marcha y repetidos de alta precisión de posicionamiento, es adecuado para una amplia gama de aplicaciones de soldadura.
3)-La seguridad de la junta de parada de emergencia independiente del sistema de control está equipado con, y el circuito del relé de seguridad adoptadas para proporcionar doble parada de emergencia en el circuito para garantizar la fiabilidad de la parada de emergencia.
4)-El robot adopta el cuerpo flexible cable especial.
5): Construido en el transformador trifásico hace 380V y 220V aislados para ayudar a la fuente de alimentación más estable.Construido en tres fases filtro puede mejorar el rendimiento de EMC y EMI.
6) El cuerpo del robot con tubo de gas de doble circuito para satisfacer la demanda de soldadura.
7)-El diámetro interior del eje 6 Oriente agujero es de 44 mm, puede satisfacer los requisitos de instalación de la antorcha de refrigeración por agua y el fuelle con linterna.
8)-cable de soldadura altamente flexible incorporada.
Especificación de producto
|
El modelo |
El CRP-RH18-20-W. |
|
Forma de brazo |
Vertical de 6 ejes múltiples articulaciones |
|
Grado de libertad |
Eje 6 |
|
Carga máxima |
20 kg. |
|
Repite la precisión de posicionamiento |
± 0,08 mm |
|
Alcanzar la máxima distancia |
1730mm |
|
El peso corporal robot |
285 kg. |
|
Modo de instalación |
El suelo, boca abajo el montaje, montaje en pared |
|
El desplazamiento máximo |
Eje 1 |
Tierra/boca abajo mountinq-167°~167°, montaje en pared -300~30° |
|
Eje 2 |
-155°~105° |
|
Eje 3 |
-170°~240° |
|
Eje 4 |
-190°~190° |
|
Eje 5 |
-90°~110° |
|
Eje 6 |
-210°~210° |
|
La máxima velocidad |
Eje 1 |
160°/s |
|
Eje 2 |
160°/s |
|
Eje 3 |
169°/s |
|
Eje 4 |
301°/s |
|
Eje 5 |
342°/s |
|
Eje 6 |
708°/s |
|
Par admisible |
Eje 4 |
55nm |
|
Eje 5 |
55nm |
|
Eje 6 |
24nm |
|
Momento de inercia permitida |
Eje 4 |
2.1Kg.m2 |
|
Eje 5 |
2.1Kg.m2 |
|
Eje 6 |
0.9Kg.m2 |
|
El entorno de instalación |
La temperatura ambiente |
0~45°C |
|
Humedad relativa |
20~80%( sin condensación) |
|
La vibración |
Debajo de 0,5 C |
|
Otros |
Instalación del robot debe estar alejado de sustancias inflamables o líquidos o gases corrosivos, fuentes de interferencia eléctrica |
|
Nivel de IP |
Cuerpo 1P54,muñeca IP67 |
|
Características Ventajas |
Estructura compacta, de alta velocidad, alta precisión, alta expansibility ana sencillo |
|
Aplicación |
Soldadura, corte, montaje, manipulación, el marcado, moler |
Las características de aplicación
|
La aplicación de soldadura de aluminio a continuación tiene características:
1) El robot se mueve suavemente, la velocidad final es coherente con la velocidad de soldadura y de la soldadura es estable con una buena forma.
2)-El robot y la soldadora adoptar pleno control de la comunicación digital, de modo que la mejor eficiencia de la soldadura y soldadura efecto puede ser ejercida.
3) Los parámetros de soldadura se puede establecer en el robot, o de la misma pieza con diferentes grosores, que requieren diferentes condiciones de proceso de soldadura: tales como el ciclo de trabajo, la frecuencia y otros parámetros, también puede conseguirse llamando a los diferentes números de trabajo a través de la robot.
4)-Hollow 500un soplete de refrigeración por agua apoya a largo plazo el doble de pulso de la soldadura.
5)-pulso simple/doble soldadora digital
6)-La penetración puede seguir siendo el mismo y mantener la estabilidad de la salida de corriente cuando el stick-longitud de cable cambios.
7)-tiene buen cortocircuito de la tecnología de transición, que puede ayudar el cordón de soldadura más uniforme y en buena forma.
8)-tiene la tecnología de pulso de arco corto, que ayuda a la velocidad de soldadura más rápido.
9) tiene una alta frecuencia de onda de dinámica de control de la energía, que logra una alta penetración de la soldadura, bajo la entrada de calor y bien reconocible patrón de escala de peces.
10) bajo la entrada de calor y el cable forzado de realimentación del encoder que es más estable y tiene un fuerte anti-interferencia. |
Fotos de la aplicación
Perfil de empresa
Lista de productos
Nuestra fábrica
Exposiciones





 Complaint
Complaint