
 Complaint
Complaint

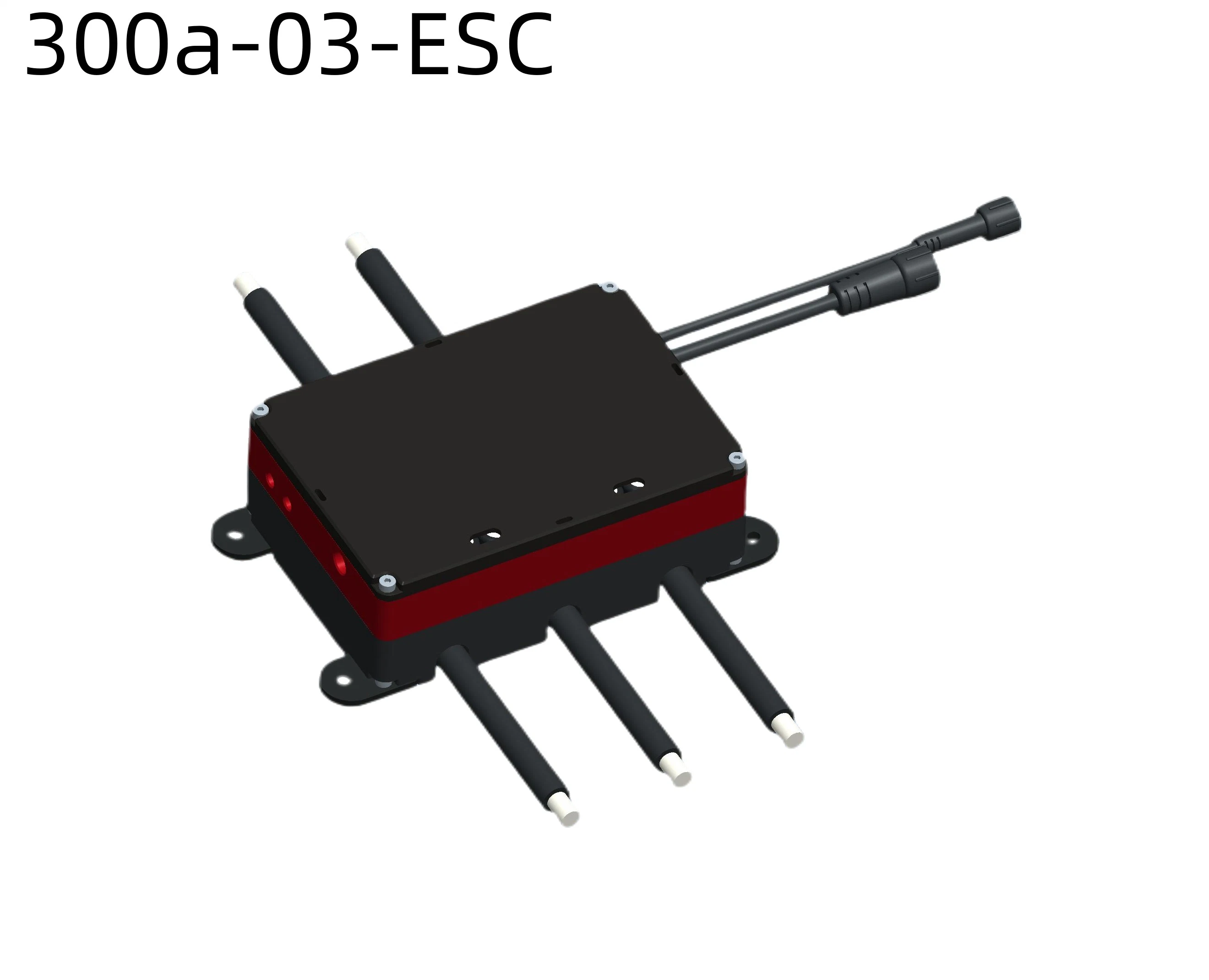
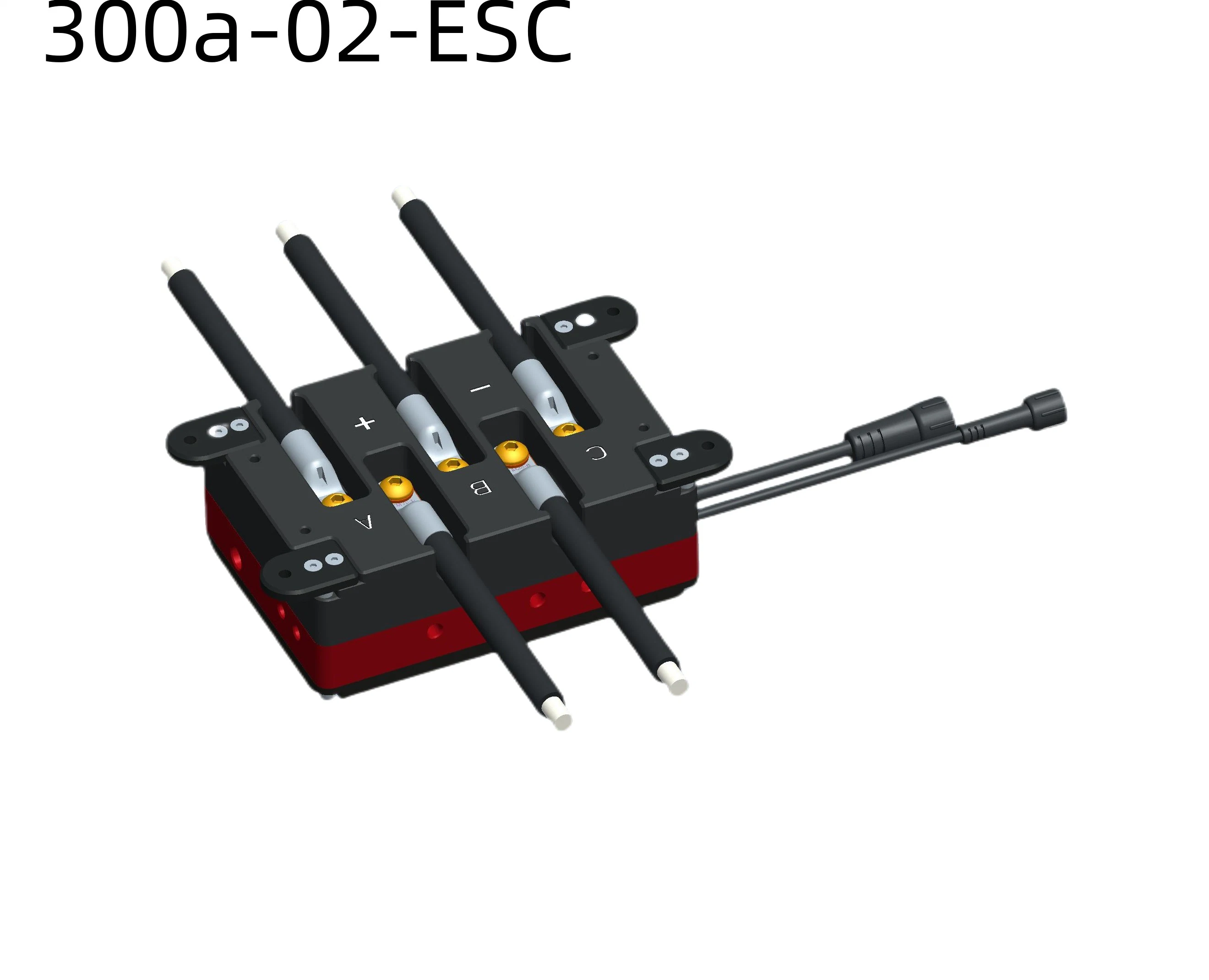
Gracias por elegir 300A 60V serie Controlador de velocidad de Electrónica Marina (ESC) de la serie por Quanly propiedad de la compañía diseño y fabricación.
Debido a la alta velocidad de rotación del motor, el sistema de alimentación sin escobillas es una poderosa dinámica. El uso incorrecto puede causar lesiones personales, por lo que recomendamos encarecidamente que lea estas instrucciones antes de usar.
La empresa Quanly derechos para modificar sus productos sin ningún tipo de notificaciones, incluyendo su apariencia y rendimiento de parámetro, requisito operativo Quanly etc.; no hace ninguna garantía, declaraciones o compromisos. Sin embargo, no asume ninguna responsabilidad causada por la modificación de los productos de terceros; Quanly no asume ninguna responsabilidad derivada de la aplicación del producto, incluida la indemnización por daños directos o indirectos.
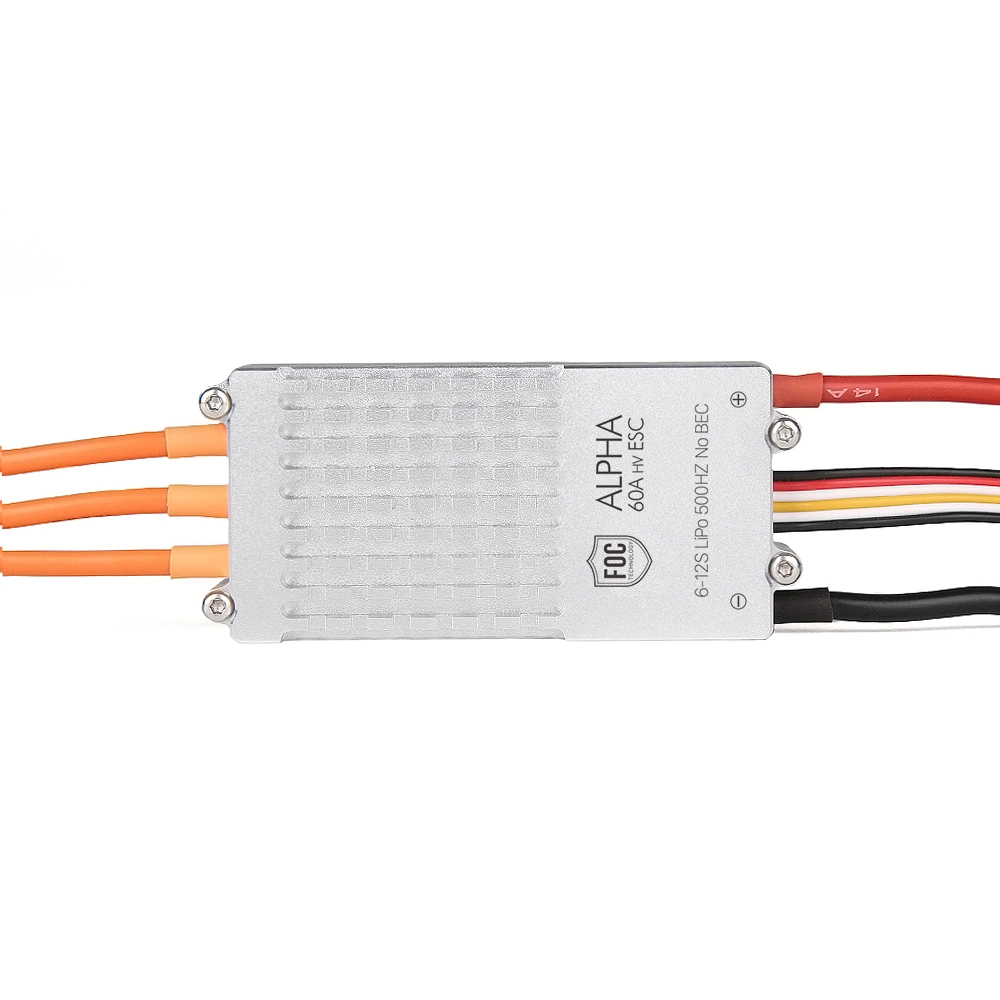
Resistente al agua marina Quanly Especificación ESC | |
| Modelo No | 60v 300A-SL-WP |
| Corriente continua Max(A) | 300A |
| La corriente máxima de trabajo(A) | 600A |
| Salida de la BEC (V) | 5V/1.5A ,14V/200mA |
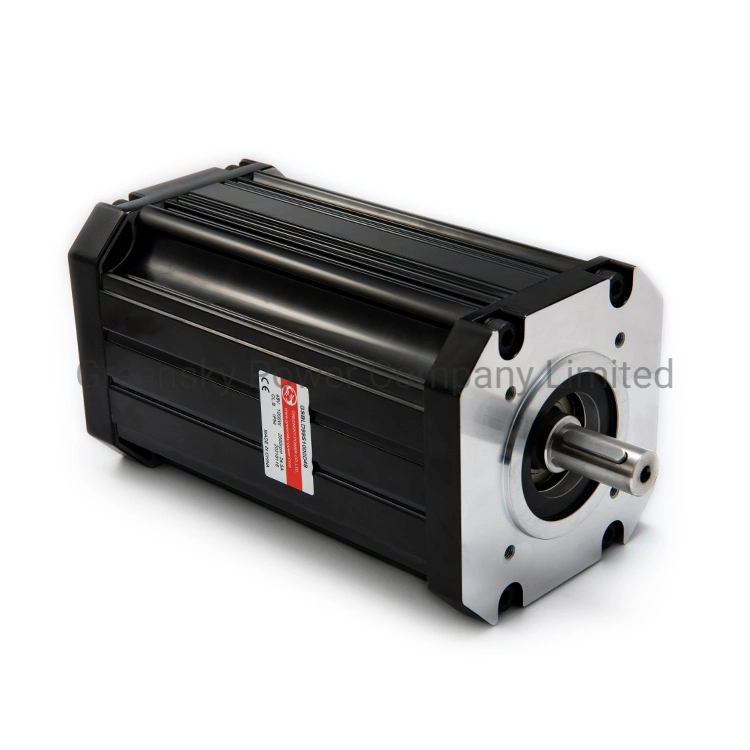
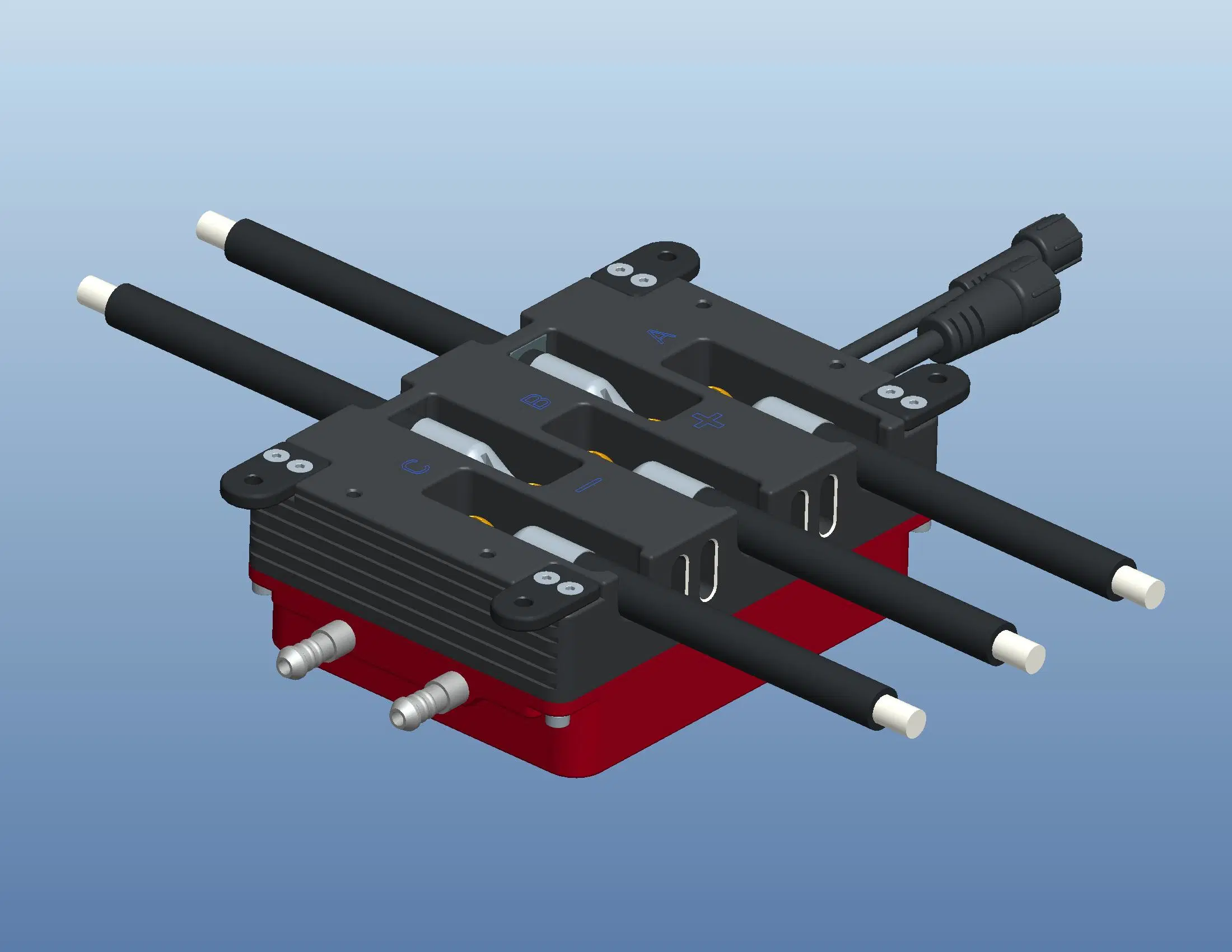
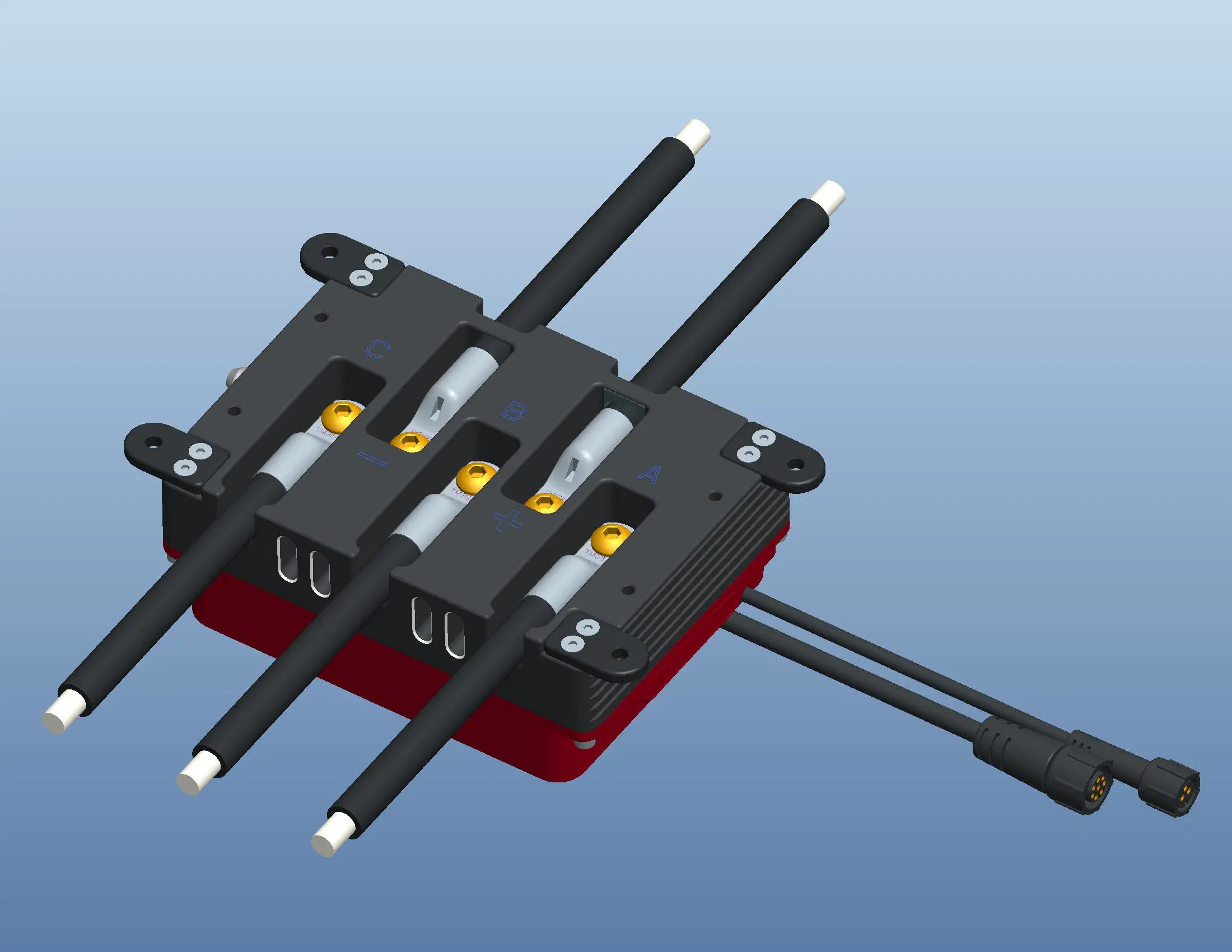
| Motor compatible con | D85L165,D107L125,D107L165, D126L200 |
| Tensión de trabajo/Lipo batería(rango de celdas) | 30-60V/10-14S LiPo |
| El nuevo peso(kg) | 1.0Kg |
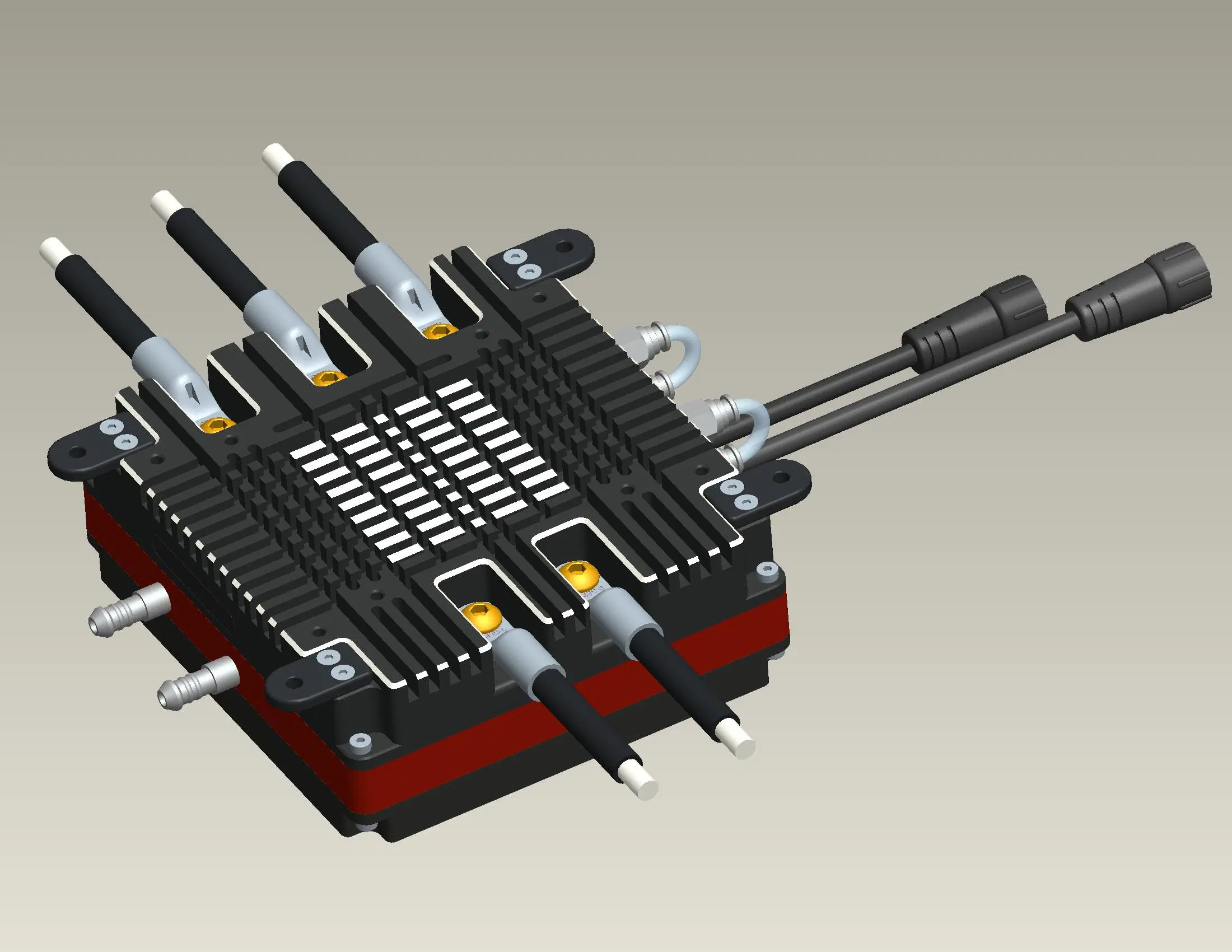
| Calibre del cable al motor | 4 awg |
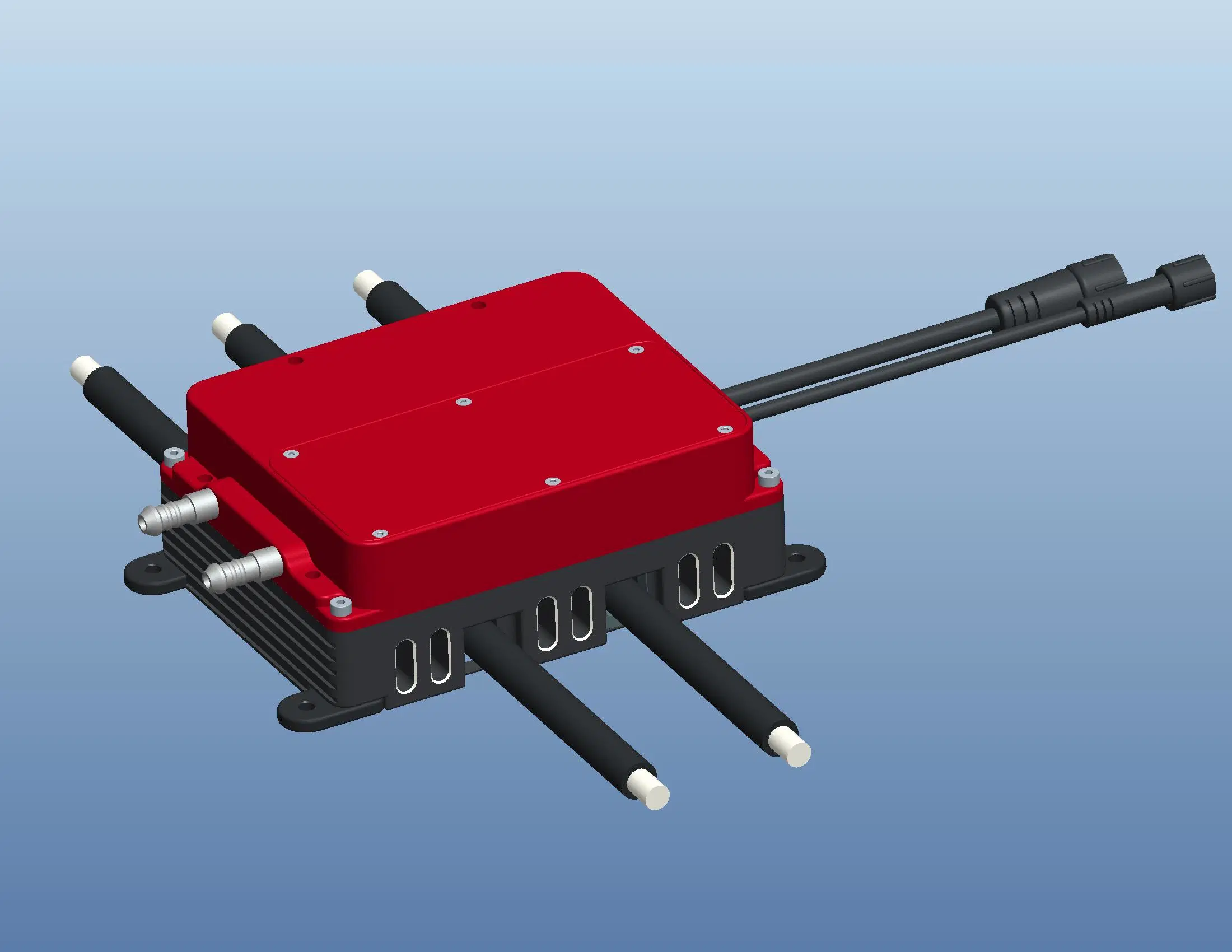
| La dimensión(mm) | L133*W80*H50 |
| Los cables hacia el receptor | 3 cables con conector impermeable |
| La solución de refrigeración | La placa del disipador de calor y refrigeración por aire |
| Grado IP | IP67 |
| Ces Temp. alta Alarma | 100 grados Centígrados/ajustable |
| De alta temperatura del motor. Alarma | 100 grados Centígrados/ajustable |
| La señal del receptor | PPM,1-2 ms |
Mínimo/Medio/Valor de aceleración máxima, 1000/1500/2000 es la configuración de fábrica.
Este valor cambiará con el valor del control remoto cuando calibrar el valor de acelerador .
ESC/Protección de la temperatura del motor, cuando la temperatura de ESC/Motor exceda del valor establecido, el ESC reducirá la velocidad en un 50% y entrar en proteger el estado. Si desactiva esta función,CES seguirá trabajando de acuerdo con la indicación de la mariposa.
La fuerza de arranque
El ajuste de par durante el inicio. Cuando el valor de ajuste es grande, el par de arranque es grande y la velocidad inicial es grande. Por el contrario, el par de arranque es pequeño y la velocidad es baja.
El motor apagado y bloqueado.
La mariposa Cuando retorno a la naturaleza y la configuración de desvío, el motor va a seguir la inercia y continúe girando. Cuando la instalación abierta, el freno de motor y se detenga de inmediato.
Compensación de desmagnetización,
Cuando el motor acelera más rápido y trabajando en la gran corriente provocará que las bobinas del motor de la desmagnetización durante un período prolongado y la rotación no es uniforme. Mientras tanto, es necesario apagar el poder de la bobina para un momento y esperar a que las bobinas a la desmagnetización. Este método reduce la potencia del motor.
| Parámetro de programa | El parámetro de configuración | |||||||
| El modo de funcionamiento | Adelante | Hacia adelante o hacia atrás | ||||||
| La dirección de rotación del motor | CW | Izda. | ||||||
| La fuerza de la mariposa hacia adelante | El 20% | El 40% | El 60% | El 80% | 100% | |||
| Invertir la fuerza de la mariposa | El 20% | El 40% | El 60% | El 80% | 100% | |||
| La sincronización del motor | Extremadamente baja | Baja | Lo normal | Alto | Extremadamente alta | |||
| Acelerado paso a paso | Super Soft | Soft | Velocidad media | Alta velocidad | Super alta velocidad | |||
| Protección de la batería baja tensión | Desprotegido | 3.1V/celda | 3,2 V/celda | 3,3 V/celda | 3.4V/celda | |||
| Selección de frecuencia) | Alto | Baja | ||||||
| Valor mínimo de aceleración | 1000 | |||||||
| El máximo valor de la mariposa | 2000 | |||||||
| Valor de aceleración media | 1500 | |||||||
| Protección de temperatura ESC | Desactivar | 80C | 90C | 100C | 110C | 120C | 130C | 140C |
| Compensación de desmagnetización | Desactivar | Baja | Alto | |||||
| La fuerza de arranque | 1.2.3.4.6 | 9 | 12. 18 | 25 | 37 | 50 | 62 | 75 |
| El motor apagado y bloqueado | Desactivar | Abrir | ||||||
| Protección de la temperatura del motor | Desactivar | 95C | 100C | 105C | 110C | 115C | 120C | 125C |
1.Cuando el uso de arma de fuego tipo controlador remoto (el modo de funcionamiento del Comité establecido en el tipo de avance/retroceso), el método de calibración del recorrido del acelerador es como sigue:
Activar el controlador y empujar al máximo el valor de la mariposa ,luego encienda el CES y escuchará el sonido del motor como "DI DI' sonido .
Continuamente cuando oiga el sonido de motor "DI DI " durante cuatro horas , que empuje el balancín de mariposa en el valor mínimo. A continuación, escuchará el sonido de "DI DI DI"en el motor, soltar el acelerador a la naturaleza y de escuchar un especial confirmar sonidos, indica que la calibración configurar bien y guardar ya.
2.Cuando el uso de tipo placa controladora (modo de funcionamiento del Comité establecido en el tipo de desvío), el método de calibración del recorrido del acelerador es como sigue:
Activar el controlador y empujar al máximo el valor de la mariposa, luego encienda el CES y esperar durante dos segundos. A continuación, escuchará el sonido del motor como "DI DI"sonido, empuje el balancín de mariposa en el valor mínimo y se oye el motor, haciendo especial sonido de confirmación, esto indica que el viaje de acelerador y así guardar ya.
| Descripción de problemas | Análisis | Solución |
| Ningún sonido del motor después de encender | La tensión de batería no era la entrada a la ESC o los polos positivos y negativos están invertidas | Comprobar si existe una conexión fiable entre la batería y el ESC. Si la soldadura no es buena, por favor, vuelva a la vendió. Si los polos positivos y negativos se invierten, por favor, corta la corriente de inmediato, de lo contrario, el CES se dañará |
| Después de la potencia del motor, el motor no arranca, haciendo sonar "Di-di-"(Advertencia sonido). | La tensión de batería no está dentro del rango normal | Controlar la tensión de batería |
| RC barco no puede hacer que la hacia atrás | El modo de funcionamiento de la CES no se ajuste a Tipo de avance/retroceso el CES no se pudo identificar el acelerador en el punto medio | Configure el modo de funcionamiento para el tipo de avance/retroceso Re-Calibrate la mariposa el viaje como se describe en la página 1 |
| Cuando el motor gira, la pérdida de potencia de repente | 1.El Comité de entrar en estado de proteger la tensión de batería baja 2.El motor ESC o entrar en un exceso de calor Proteger el estado | Sustituir la batería de inmediato. La temperatura del motor o ESC es demasiado alta, espere a que la temperatura del motor ESC o quedándose sin antes de usarlo. |
| El motor no se puede iniciar, sólo puede agitar | 1.Los cables del motor y el CES el cable no está bien conectado 2.El CES o en el motor dañado | Inspeccionar cuidadosamente el conector de malas conexiones Sustituir el CES o en el motor |
| El mando a distancia aumenta el acelerador en la dirección de avance, pero el barco RC invierte | La secuencia de conexión entre el CES el cable y los cables del motor es incorrecto | El cable del motor fijo y un cable ESC,cambiar otros dos cables. |