
 Complaint
Complaint

1. Isoler la communication CANopen selon la spécification CiA301 V4.2.0
A. PRISE EN CHARGE SDO, TPDO, RPDO.
B. mode vitesse de support, mode position (mode contour, mode interpolation)
C. soutenir la production et la consommation de Heartbeat
2. encodeur absolu 15 bits, impulsion de circuit jusqu'à 32768.
3. Structure de moteur DD multi-étages, sortie de couple importante.
4. Réducteur d'harmoniques, moteur, driver et encodeur intégrés.
5. Faible bruit, faible vibration, positionnement à grande vitesse, haute fiabilité.
6. Contrôle vectoriel orienté champ FOC, position de support / vitesse en boucle fermée.
7. Peut fonctionner à l'hystérésis zéro à l'état d'impulsion donné, après une hystérésis nulle.
8. caractéristiques de l'engrenage électronique 16 bits.
9. Le calculateur supérieur CANopen est fourni, qui peut surveiller l'état du moteur et modifier les paramètres.
10. Mode de position, impulsion de support + signal de direction, encodeur à suivre.
11. Mode vitesse, prend en charge la régulation de vitesse du signal de cycle de service PWM
12. Il a la fonction de bloquer la rotation, la protection contre les surintensités et la protection contre les surtensions.
13. Valeur absolue de faible consommation d'énergie et multitours
A. la version 485/CAN du servo tout-en-un peut ajouter une fonction multitour.
B. lorsque le moteur est alimenté, un circuit de charge est à l'intérieur pour charger la batterie. Lorsque le moteur est mis hors tension, la consommation de courant de la batterie est seulement de 0,07 mA.
C. une fois que le moteur n'est pas alimenté, l'arbre du moteur est entraîné pour tourner pour réveiller l'encodeur et continuer à mémoriser la position.
D. mémoire multitours -60000 ~ 60000 tours.
E. Réglage simple de l'origine, elle peut être définie comme origine à n'importe quelle position.
F. plusieurs méthodes de retour au zéro : retour au zéro de communication, retour automatique au zéro à la mise sous tension et sortie du signal de point zéro.
G. protection contre les erreurs : alarme de panne de courant de la batterie.
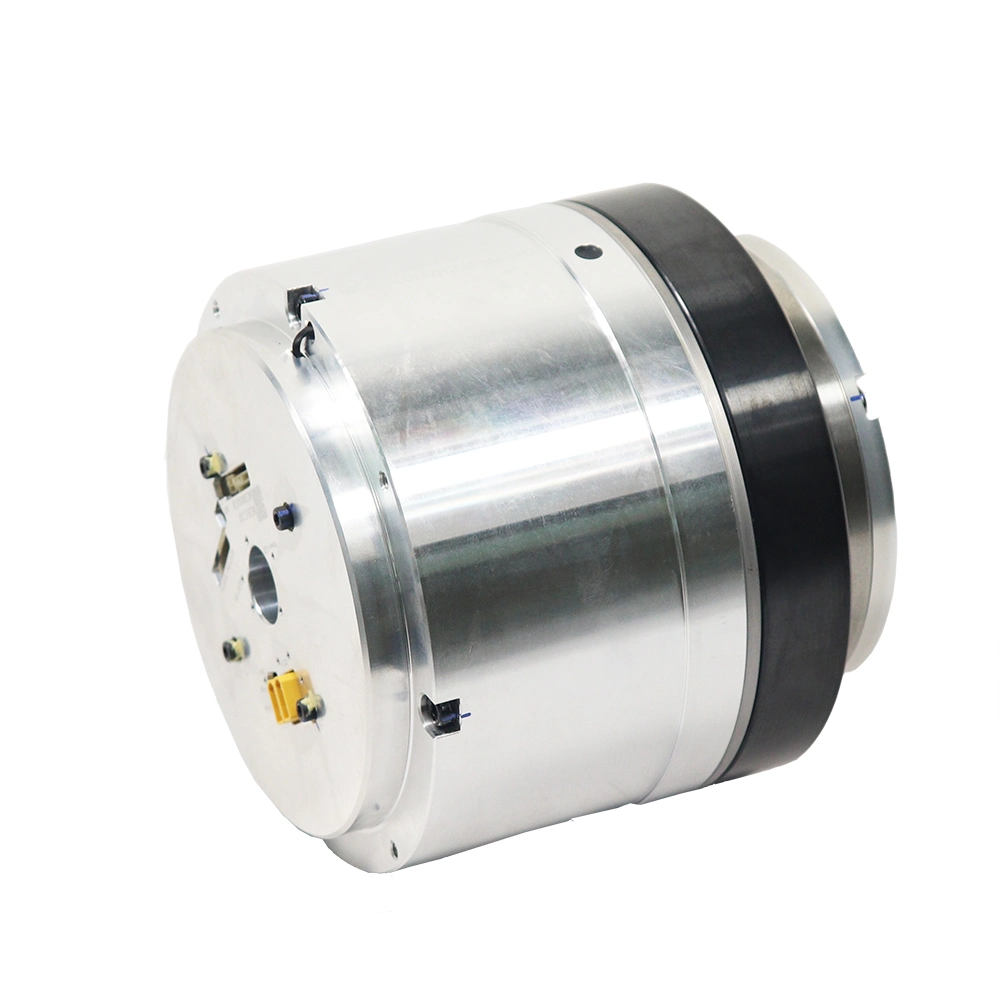
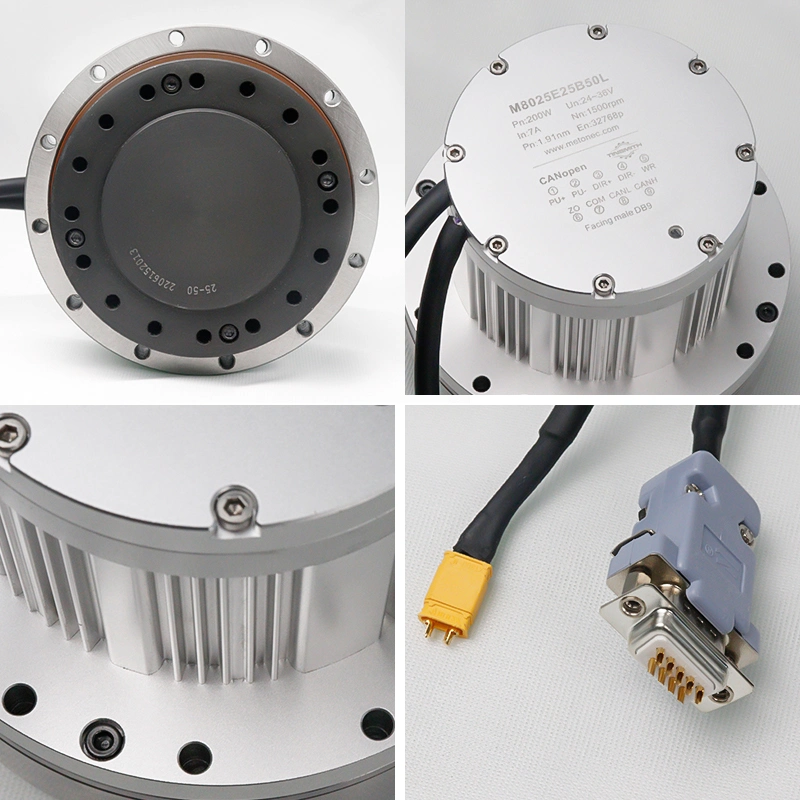
Réducteur d'harmoniques 17 très intégré, moteur CC 100 W 1 500 tr/min, driver de moteur et encodeur de valeur absolue à un tour 15 bits + encodeur de valeur absolue à plusieurs tours 9 bits
PRISE EN CHARGE DE SDO TPDO RPDO
Fournir un logiciel d'ordinateur hôte CANopen qui peut surveiller l'état du moteur et modifier les paramètres
Mode de position, impulsion de support + signal de direction, suivi de l'encodeur (ACTIONNEUR DE L'ARTICULATION DU ROBOT m5730)
Mode vitesse, prend en charge la régulation de vitesse du signal de cycle de service PWM
La vitesse est contrôlée par le cycle de service de l'impulsion vers l'unité de commande. La plage de vitesse de cycle de service de 10 %~90 % représente 0~Max_Speed (vitesse_max est la vitesse cible de la protection en mode de position. En réglant ce paramètre, la vitesse requise peut être contrôlée plus précisément. , ne vous inquiétez pas de dépasser la vitesse programmée). La fréquence de pu est de 1 K à 10 K.
Cycle de service pu=(vitesse cible/3000)*80%+10%
Par exemple : il faut tourner la vitesse 2000
Cycle de service pu =(2000/3000)*0.8+0.1=63.3%
Communication CANopen isolée, alimentation isolée intégrée, faible consommation électrique valeur absolue multi-tours, batterie intégrée, charge automatique.
Paramètre de l'actionneur du moteur de liaison du robot série M80250
| Modèle | Paramètre | M8025E25B50L | M8025E25B80L | M8025E25B100L |
| Paramètre global | Tension nominale du moteur | 36 VDC ±10 % | 36 VDC ±10 % | 36 VDC ±10 % |
| Courant nominal du moteur | 7A | 7A | 7A | |
| Couple de sortie après décélération | 51NM | 85 NM | 100 NM | |
| Poids | 2.5KG | 2.5KG | 2.5KG | |
| Plage de vitesse après décélération | 0 À 30 TR/MIN | 0 À 18 TR/MIN | 0 À 10 TR/MIN | |
| Paramètre de réducteur | Rapport de réduction | 50 | 80 | 100 |
| Couple nominal | 51NM | 82NM | 87 NM | |
| Couple de pointe de démarrage/arrêt | 127NM | 178NM | 204NM | |
| Valeur maximale autorisée du couple de charge moyen | 72 NM | 113NM | 140 NM | |
| Couple maximal momentané autorisé | 242NM | 332 NM | 369NM | |
| Jeu entre-dents | < 20 secondes d'arc | < 20 secondes d'arc | < 20 secondes d'arc | |
| Durée de vie de la conception | 8500 heures | 8500 heures | 8500 heures | |
| Paramètre du moteur | Couple | 2 NM | 2 NM | 2 NM |
| Vitesse nominale | 1 000 TR/MIN | 1 000 TR/MIN | 1 000 TR/MIN | |
| Vitesse de rotation maximale | 1 500 TR/MIN | 1 500 TR/MIN | 1 500 TR/MIN | |
| Puissance | 200 W. | 200 W. | 200 W. | |
| Résistance | 0.53 | 0.53 | 0.53 | |
| Inductance | 0,5mh | 0,5mh | 0,5mh | |
| Inertie de rotation | 1,74x10-4 KG/M2 | 1,74x10-4 KG/M2 | 1,74x10-4 KG/M2 | |
| Signal de retour | Encodeur absolu multi-boucle (boucle simple 15 bits multi-boucle 9 bits) | |||
| Mode de refroidissement | Refroidissement naturel | |||
| Mode de contrôle de position | Fréquence d'impulsion d'entrée maximale | 500 kHz | ||
| Mode d'instruction d'impulsion | Impulsion + direction, PHASE A + phase B. | |||
| Rapport de vitesse électronique | Configurez 1 à 65535 à 1 à 65535 | |||
| Fréquence d'échantillonnage de l'emplacement | 2 kHz | |||
| Fonction de protection | Alarme de rotation obstruée, alarme de surintensité | |||
| Interface de communication | EasyCAN (communication CAN, débit 1 M) | |||
| Environnement | Température ambiante | 0 à 40° | ||
| Température max. Autorisée du moteur | 85° | |||
| Humidité | 5 à 95 % | |||
Avec conception modulaire, module à joint compact, son poids, sa taille, son mode d'installation, La lampe d'apparence par rapport aux produits traditionnels ont fait une optimisation considérable, principalement utilisé dans le robotan coopératif et le robot léger, peut répondre à la miniaturisation, léger, modulaire besoins dans une large mesure.peut également être largement utilisé dans les robots industriels, robots de service, l'équipement d'automatisation industrielle, l'équipement de tour et etc
1. Nous acceptons les modules de liaison robot de petite taille ;
2. La livraison des modules de liaison robot est effectuée dans un délai de 10 jours, le délai de livraison de la commande de quantité massique est de 7-15 jours ;
3. Nous pouvons accepter le paiement par PayPal, T/T et L/C;
4.l'assurance qualité de nos modules de joints robotisés est de 1 an, et nous pouvons vous fournir un support technique professionnel;
5. Nous fournissons un logiciel gratuit de formation baguette pour utiliser les modules de joint de robot. Des ingénieurs sont disponibles pour l'assistance technique.
Q: Êtes-vous une société de commerce ou un fabricant?
R: Nous sommes fabricant et société de commerce.
Q: Puis-je avoir un échantillon de demande?
R: Oui, nous nous félicitons de la commande d'échantillon pour tester et vérifier la qualité.
Q: Combien de temps votre délai de livraison est-il?
R: En raison de la complexité du processus, la production prend 8-10 jours ouvrables. Pour les produits personnalisés, veuillez nous contacter avant de passer commande.
Q. Comment expédiez-vous les marchandises et combien de temps faut-il pour arriver?
R: Habituellement par express, comme DHL, UPS, FedEx, EMS ou TNT; Par air et par mer sont également disponibles.
L'arrivée express prend 3-15 jours.
Q: Quelles sont vos conditions de paiement?
R: Nous acceptons le Trade assurance Order, TT, Paypal, West Union et L/C.