Description
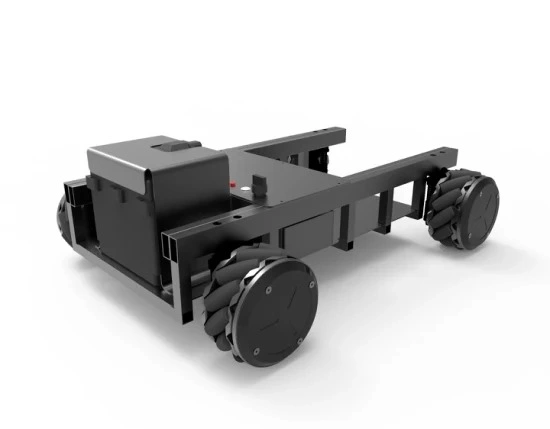
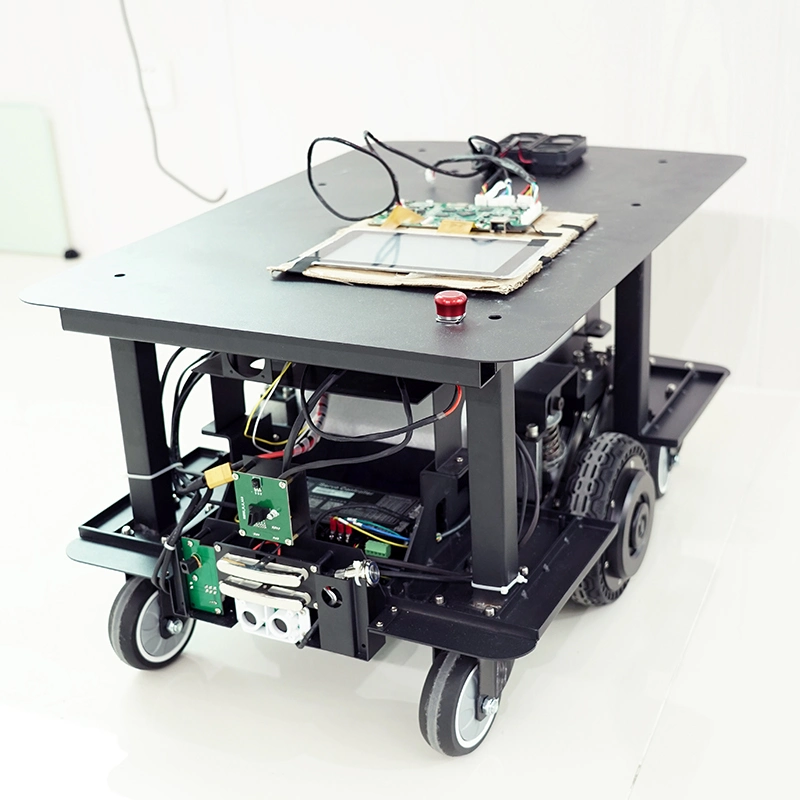
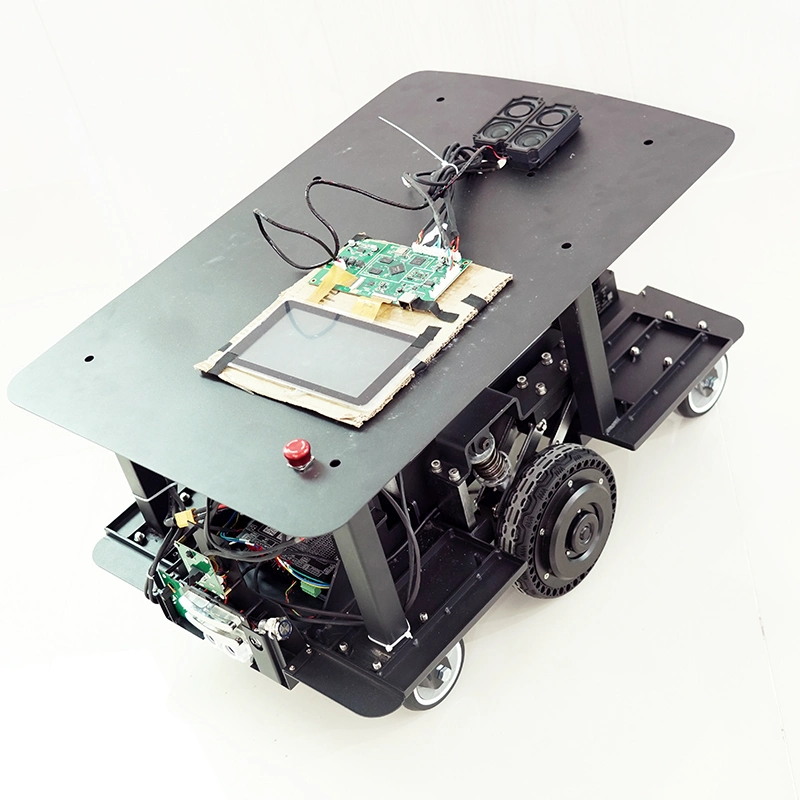
Ranger le châssis du robot
Le robot possède plusieurs fonctions du châssis tels que Visual positionnement, la navigation intérieure, obstacle intelligent et d'évitement. Il est principalement composé de matériel de base tels que les capteurs de lidar, de la profondeur des caméras, des capteurs anti-chute, modulaire et systèmes de navigation et de positionnement. Il y a plus de laser et de V-SLAM SLAMThe Algorithme de fusion du capteur peut planifier le robot itinéraire à pied de façon plus souple.




 Complaint
Complaint