Complaint
Complaint

Introduction
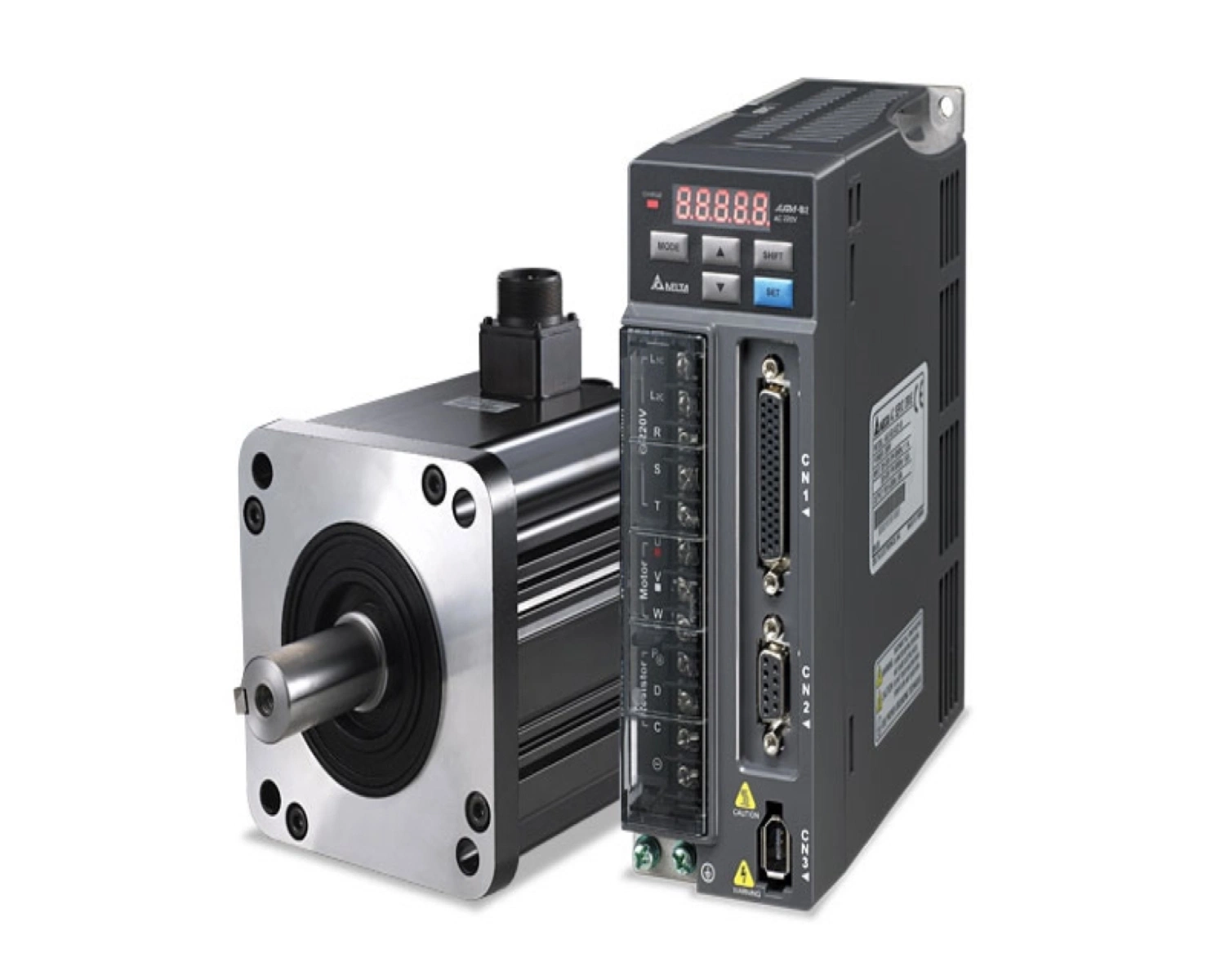
La série QX Servo Driver adopte les méthodes de contrôle avancées telles que le courant feedforward control, accélération feedforward control, observateur de vélocité et d'inertie observateur. Avec ces méthodes, il a une réactivité élevée et peuvent surveiller la charge de l'inertie en ligne en temps réel, et de régler le gain à tout moment pour obtenir le meilleur effet de contrôle.
Pilote de la série QX ont le type d'impulsion pour QXEP QXMP et Ethercat type .peut avec l'17bits et 24 bits pour que la tension du moteur servo 0.1kw-3kw
Fonctionnalité
1. Vitesse jusqu'à 2,89 KHz fréquence de réponse ;
2. 3,5 fois la capacité de surcharge ;
3. Multi-fonction de surveillance en temps réel ;
La spécification
Le point | La spécification | |
Fonction | Commutation de gain | 5 niveau de commutateur de gain peut être effectuée |
Le jugement de positionnement | Impulsion 0~5000 | |
Limite positive/marche arrière | Réalisé par le biais de matériel et logiciel | |
Le traitement de régénération | Résistance de freinage régénérateur externe | |
Fonction de protection | Surintensité, de surtension, régénératrices | |