




 Complaint
Complaint

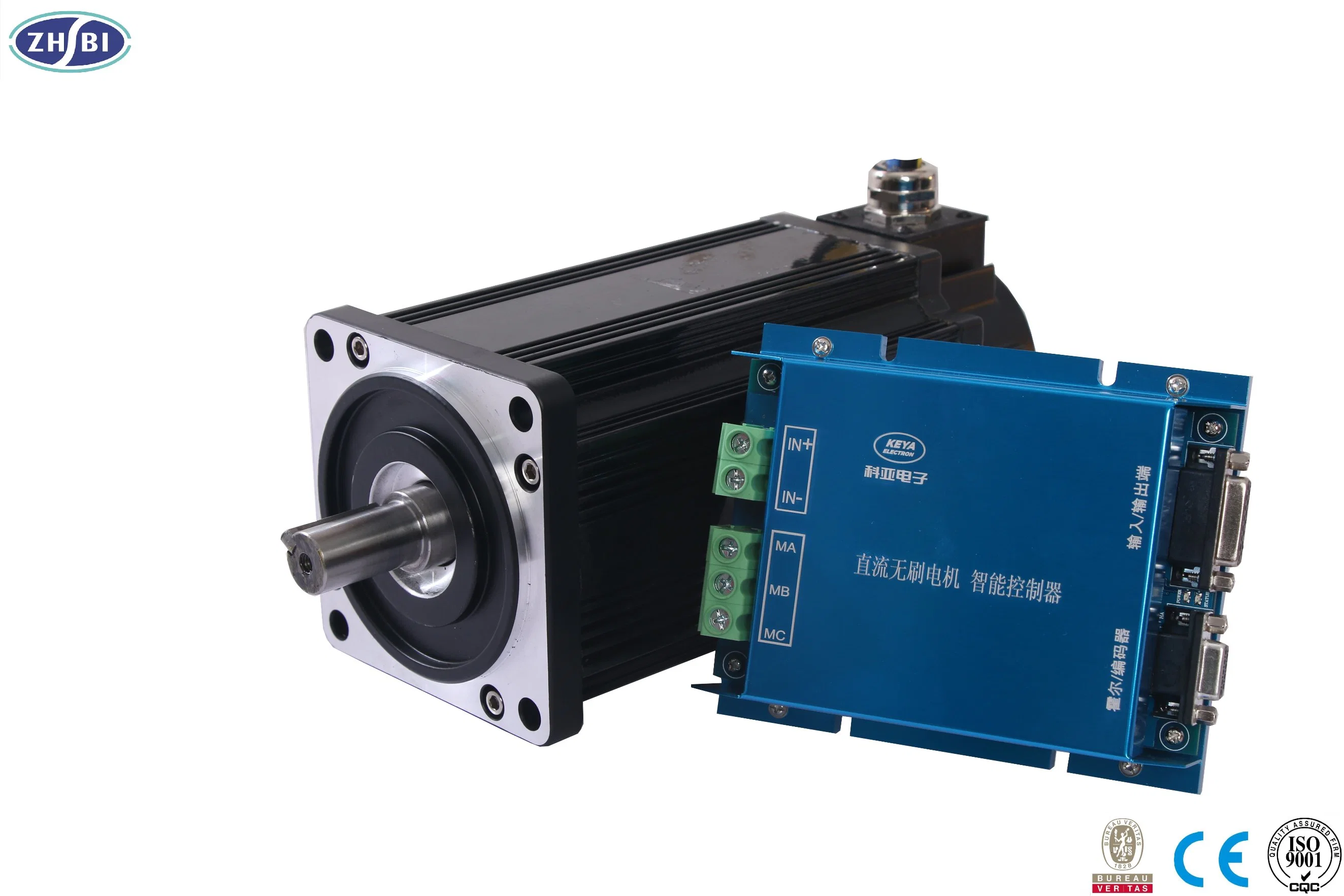
description du produit
PC2 12 V cc du contrôleur de vitesse du moteur avec le CAN
II. La spécification et le modèle
MAX MAX DC
Plage de tension de sortie de l'AMP de sortie
Modèle AC : (a)(V) DC : DC :(V)
KYDBL4850-1E 50 55 10-55
III. Caractéristiques produit :
Large gamme d'entrée de tension, 10-55V.
Boucle de contrôle PID intelligents.
Mode de travail : Vitesse Boucle ouverte, fermez-boucle de contrôle, proche de la commande en boucle de couple, position étroite-boucle de contrôle.
Un potentiomètre externe, analogique 0-5 V la quantité ou le mode de contrôle de la commande d'impulsion, RC (signal de largeur d'impulsion émise par le récepteur de télécommande aeromodeling) mode de contrôle.
La sécurité avant et arrière, contrôle de fonctionnement à quatre quadrants, le soutien de la régénération.
Activer la fonction de contrôle.
Un maximum de courant de commande.
Port d'entrée à 4 voies ; la fonction peut être défini comme entrée analogique, entrées d'impulsion ou de fonctions d'entrée numérique.
À 6 voies numériques (tube MOS drain ouvert) sortie, qui peuvent servir de l'alarme de défaillance
État de sortie du contrôleur et peut contrôler le relais externe pour réaliser des actions telles
Comme la déconnexion automatique d'alimentation.
Les anomalies comme contre les surintensités, surchauffe, les surtensions et les court-circuit démarre la fonction de protection.
LED indicateur d'État.
Communication de bus CAN, voir le protocole de communication détaillée lors de son utilisation.
La communication RS232, voir le protocole de communication détaillée lors de son utilisation.
IV. Indice de rendement :
1. Tension d'alimentation : 10-55VCC).
2. À la température ambiante de 25ºC, courant de travail continu 30A, courant transitoire jusqu'à 75A 30S.
3. La vitesse minimum : 10 tr/min de la vitesse de près le mode de boucle ; 1 rpm dans le mode de position.
4. Hors alimentation +5VDC (il peut alimenter jusqu'à l'encodeur) : 5V DC 20mA
5. Plage d'entrée analogique : 0-- 5VCC
6. Plage d'entrée d'impulsion : 500Hz-5000Hz (vitesse maximale correspondante)
[Remarque] Le minimum de la fréquence d'impulsion peut changer avec le réglage de la vitesse maximale.
7. Gamme d'entrée de service ratio de 0%-- 100 % (fréquence d'entrée de gamme f ≤ 1 KHz, recommander à utiliser la fréquence de 250Hz).
8. Statut de protection de la température : Lorsque la température est de 70ºC, le contrôleur va réduire la production par la surchauffe de la protection et s'arrête lorsque la température de sortie est de 80ºC.
9. La température de fonctionnement : -20 ºC-- +60ºC.
10. Humidité ambiante : de l'humidité relative≤80Rh.
11. Dimension : limite l * W * H = 190mm * 130mm * 40mm
11. Poids : 800g
| Nom du produit | Programmable du contrôleur CC sans balai |
| Matériel | KYDBL4875-1E |
| Courant | Courant nominal:40A,courant max:75A |
| VOLT | 10-55Vcc |
| Mode de contrôle | 0-5 V,RS232,PEUT |
| Progeamable | Oui |
| La rétroaction | Encodeur,hall |
| Utilisé | Le robot en voiture, AGV |














