 Complaint
Complaint

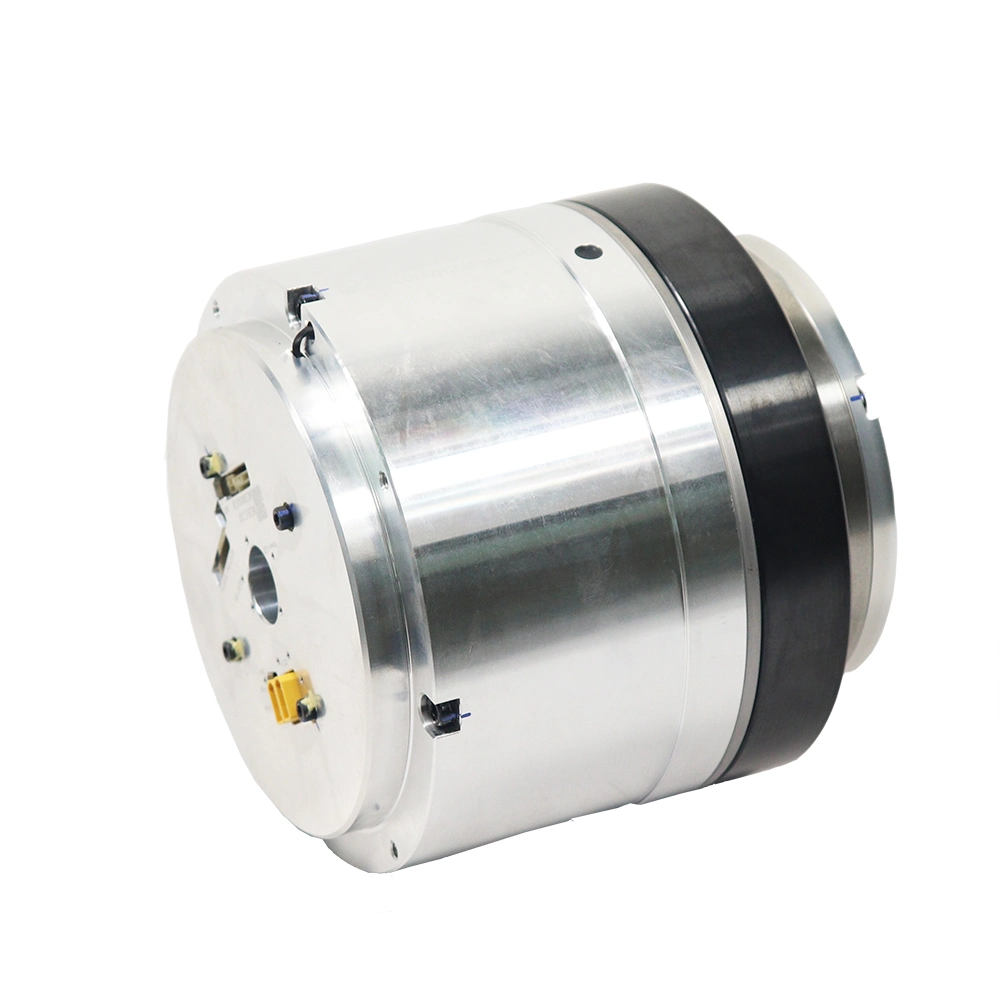
L'actionneur d'articulation de robot de petite taille OD 80 mm est principalement utilisé pour le bras de robot, le réducteur harmonique intégré, l'encodeur, le moteur à courant continu et le pilote. Le moteur servo d'articulation de robot peut être utilisé directement dans l'articulation du bras de robot, ce qui permet de construire rapidement des articulations de robot.
1. Support SDO TPDO RPDO
2. Fournir un logiciel d'ordinateur hôte CANopen qui peut surveiller l'état du moteur et modifier les paramètres
Mode de position, support du signal d'impulsion + direction, suivi de l'encodeur
Mode de vitesse, support de régulation de vitesse du signal de cycle de service PWM
Lorsque le moteur est alimenté, il y a un circuit de charge à l'intérieur pour charger la batterie. Après que le moteur ne soit plus alimenté, l'arbre du moteur est entraîné en rotation pour réveiller l'encodeur et continuer à mémoriser la position ; la consommation de courant de la batterie n'est que de 0,07 mA.
| Paramètre | M5730BE17B50L | M5730BE17B80L | M5730BE17B100L | |
| Paramètre global | Tension nominale du moteur | 36VDC±10% | 36VDC±10% | 36VDC±10% |
| Courant nominal du moteur | 3,5A | 3,5A | 3,5A | |
| Couple de sortie après décélération | 34NM | 35NM | 51NM | |
| Poids | 1KG | 1KG | 1KG | |
| Plage de vitesse après décélération | 0~30RPM | 0~18RPM | 0~15RPM | |
| Paramètre de réducteur | Rapport de réduction | 50 | 80 | 100 |
| Couple nominal | 21NM | 29NM | 31NM | |
| Couple de démarrage-arrêt de crête | 44NM | 56NM | 70NM | |
| Valeur maximale admissible du couple de charge moyen | 34NM | 35NM | 51NM | |
| Couple maximum admissible momentané | 91NM | 113NM | 143NM | |
| Backlash | <20 secondes d'arc | <20 secondes d'arc | <20 secondes d'arc | |
| Vie de conception | 8500 heures | 8500 heures | 8500 heures | |
| Paramètre du moteur | Couple | 1NM | 1NM | 1NM |
| Vitesse nominale | 1500RPM | 1500RPM | 1500RPM | |
| Vitesse de rotation maximale | 2000RPM | 2000RPM | 2000RPM | |
| Puissance | 100W | 100W | 100W | |
| Résistance | 0,86 | 0,86 | 0,86 | |
| Inductance | 0,8mh | 0,8mh | 0,8mh | |
| Inertie de rotation | 0,69x10-4 KG/M 2 | 0,69x10-4 KG/M 2 | 0,69x10-4 KG/M 2 | |
| Signal de rétroaction | Codeur absolu à boucle multiple (15 bits à boucle unique, 9 bits à boucle multiple) | |||
| Mode de refroidissement | Refroidissement naturel | |||
| Mode de contrôle de position | Fréquence d'entrée d'impulsion maximale | 500KHz | ||
| Mode d'instruction par impulsion | Impulsion + direction, phase A + phase B | |||
| Rapport de réduction électronique | Configurer ~65535 à 65535 | |||
| Fréquence d'échantillonnage de position | 2KHZ | |||
| Fonction de protection | Alarme de surintensité | |||
| Interface de communication | Easycan (communication CAN, taux 1 M) | |||
| Environnement | Température ambiante | 0~40° | ||
| Température maximale admissible du moteur | 85° | |||
| Humidité | 5~95% | |||
Avec une conception modulaire, un module d'articulation compact, son poids, sa taille, son mode d'installation, son apparence par rapport aux produits traditionnels ont été considérablement optimisés, principalement utilisés dans les robots collaboratifs et et robot léger, peut répondre dans une large mesure aux besoins de miniaturisation, de légèreté et de modularité. Peut également être largement utilisé dans les robots industriels, les robots de service, les équipements d'automatisation industrielle, les équipements de tour et autres.
Zhengzhou Defy Mechanical&Electrical Equipment Co., Ltd. est un fabricant professionnel deModule d'articulation robotique. Notre usine se consacre à la recherche du moteur d'articulation de robot depuis les années 2010, plus de 10 ans d'expérience font que notre qualité de produit se classe en tête en Chine. Avec une production annuelle de 80 000 ensembles de produits divers pour le marché, avec une précision élevée et des performances stables, nos modules d'articulation robotique sont appréciés par les clients d'Inde, de Thaïlande, d'Iran, de Corée du Sud, de Fédération de Russie, de Suède, d'Irlande, de Pologne, des États-Unis, de France, etc.
1. Nous acceptons les petites commandes de module d'articulation ;
2. Le délai de livraison de la commande d'échantillon du module d'articulation est de 9 jours, le délai de livraison de la commande en quantité importante est de 9 à 15 jours ;
3. Nous pouvons accepter le paiement via paypal, T/T et L/C ;
4. L'assurance qualité de notre module d'articulation est de 1 an, et nous pouvons vous fournir un support technique professionnel ;
5. Nous fournissons gratuitement un logiciel et une formation sur la façon d'utiliser les produits. Des ingénieurs sont disponibles pour un support technique.
Q : Êtes-vous une société commerciale ou un fabricant ?
R : Nous sommes fabricant et société commerciale.
Q : Puis-je avoir une commande d'échantillon ?
R : Oui, nous acceptons les commandes d'échantillons pour tester et vérifier la qualité.
Q : Quel est votre délai de livraison ?
R : En raison du processus complexe, la production prend 8 à 10 jours ouvrables. Pour les marchandises personnalisées, veuillez vérifier avec nous avant de commander.
Q. Comment expédiez-vous les marchandises et combien de temps cela prend-il pour arriver ?
R : Généralement par express, comme DHL, UPS, FedEx, EMS ou TNT ; Par avion et par mer sont également disponibles.Express prend 3 à 15 jours pour arriver.
Q : Quelles sont vos conditions de paiement ?
R : Nous acceptons la commande d'assurance commerciale, TT, Paypal, West Union et L/C.