Description
BRAS ROBOTIQUE DE BUREAU ÉDUCATIF
TECHNOLOGIE DE COMMANDE MCU BRAS ROBOTIQUE OPEN SOURCE 3 AXES
NO. D'ART.: ZKBOT-302ED
Notre bras robotique éducatif
Il est chargé en dessous de 0.5kgs de 3 axes de l'éducation robotique bras . De plus en plus d'établissements d'enseignement achètent notre bras robotique d'éducation, qui permet aux étudiants d'apprendre les principes de la science, de l'ingénierie, de la programmation, de l'intelligence artificielle et de l'automatisation, et d'améliorer leurs compétences techniques, la pensée, la créativité, le travail d'équipe et les compétences de résolution de problèmes. Ils les aident à progresser dans leur cheminement de carrière futur.
À propos de nous
ZekEEP (Foshan Zehet Technology Co., Ltd) est établi en 2015 à Foshan en Chine en facilitant le développement et la mise à niveau des armes robotiques industrielles en Chine et en développant continuellement des applications étendues dans ce domaine. Depuis 2015, la société a commencé à se concentrer sur la recherche et le développement de l'économie intelligente petit industrie robot bras, éducation robot bras.
|
Paramètres de travail du robot |
|
Modèle : ZKBOT-302Ed |
DOF : 3 axes |
|
Charge utile : 0,5KGS |
Précision de la position de répétition : ±1 MM |
|
Portée max.: 400MM |
Température de fonctionnement : -10°~50° |
|
Tension d'alimentation : AC220V/110V |
Puissance : max. 150 W. |
|
Locus de mouvement : poin-to-point |
Système de coordonnées : système de coordonnées de liaison : |
|
E/S : entrée 2 / sortie 2 |
Consommation électrique : 30 W. |
|
Moteur :42 décélération moteur pas-à-pas |
Contrôle : APPLICATION mobile/télécommande/boîtier de commande |
|
Environnement appliqué : éviter tout contact avec des gaz et liquides inflammables, explosifs ou corrosifs. Tenir éloigné des sources de bruit électroniques (plasma) |
|
Paramètres de travail DES AXES |
|
|
J1 |
80°/s |
|
Vitesse max. : |
J2 |
80°/s |
|
|
J3 |
80°/s |
|
|
J1 |
-300 |
|
Plage de fonctionnement max. : |
J2 |
-90 |
|
|
J3 |
-90 |
|
Paramètres de base du robot |
|
Matériau : alliage d'aluminium |
Taille de la base : 180mm*180mm |
|
Poids net (kg) : 5,2 kg |
Poids brut (kg) : 9 kg |
|
Taille du boîtier de commande : (L)193mm*(l)116mm*(H)26mm |
|
Garniture:(L)490mm*(L)320mm*(H)380mm |
|
PARAMÈTRES DU MOTEUR PAS À PAS |
|
Couple de maintien : 0,4N*M. |
Tension nominale : 24 V. |
|
Courant nominal : 1,7A |
Angle de pas : 1.8° |
|
Numéro de phase : deux fils de phase quatre |
|
PARAMÈTRES DU RÉDUCTEUR |
|
Rapport de réduction :1:10 |
Couple de sortie maximum : 5N*M. |
|
Vitesse d'entrée nominale : 3000 |
FAQ
Q1: Offrez-vous une garantie pour les produits?
R: Oui, nous offrons une garantie d'un an pour nos produits.
Q2 : combien de temps votre délai de livraison est-il ?
R: Normalement, il est d'environ 15 jours ouvrables. Si nous avons des robots en stock, nous pouvons les envoyer immédiatement.
Q3 : pouvez-vous fournir un document technique ?
R: Oui. Et c'est en anglais.
Q4 : quelle langue votre système prend-il en charge ?
R : l'interface utilisateur est en anglais.
Q5 : Comment résoudre les problèmes lors de l'utilisation du produit ?
R: Nous fournissons une assistance en ligne gratuite, si non résolu, reviendra à l'usine pour la maintenance.
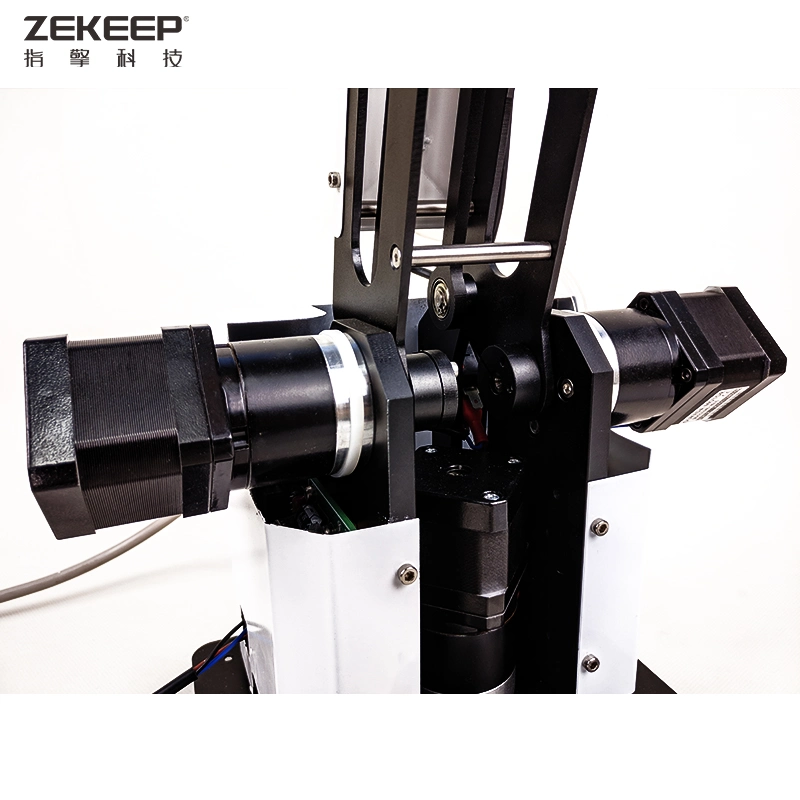
Images détaillées,Paramètres de travail,joint 3 bras monospaces vers le haut et vers le bas,joint 2 petit bras se déplaçant vers le haut et vers le bas,joint 1 rotation du corps,longueur maximale du bras 400 mm,réducteur planétaire 1:10,pompe à air standard, Pince remplaçable, moteur pas à pas biphasé industriel, Introduction de fonction, technologie de commande, base sur la technologie contrôle par API pour les bras robotiques open source 3 axes peuvent aider le client pour deux fois de développement, conception des griffes, peut facilement se griffe pour des marchandises de 500 g. Et fournissent un bon équipement pour l'enseignement, une forte aspiration, un petit bras mécanique peut supporter une pompe à air de 500 g pour aspirer des objets, convient à l'enseignement, facile à déployer en 20 minutes, garantissant une installation rapide en 1 heure. Notre technologie logicielle rend le fonctionnement et la gestion du bras robotique intelligents et rapides. Il peut simuler avec précision les actions humaines en démontrant le chemin sans compétences de programmation requises, Ils sont parfaits pour les techniques d'apprentissage robustes et les méthodes d'enseignement innovantes..bague de retenue industrielle durable,bague de retenue industrielle,1,longue durée de vie,2,durable et non glissant,3,il n'est pas facile à tomber,bague de retenue normale,1,durée de vie courte,2,facile à glisser,3,facile à tomber,interrupteur de fin de course haute qualité,garantir la précision du manipulateur,adopter la position professionnelle d'origine NSK roulement faible bruit plus lisse plus durable , le câblage caché de conduit d'air le rend plus propre, sûr et beau, peu encombrant, léger, Et petit, avec une dimension d'encombrement de 180 mm × 180 mm, il peut s'adapter à n'importe quel environnement de production plus petit qu'un morceau de papier A4 et libérer plus d'espace dans l'usine pour la production. Boîtier de commande indépendant et sûr, alimentation de commutateur indépendant, rendre la tension plus stable et plus sûre, écran tactile, Ouvrir tous les ports de contrôleur PLC, peut être en ligne de commande et d'apprentissage, diagramme de fonctionnement, commutateur de marche, deux route 485 protocole Modbus 232 support téléchargement programme communication écran tactile, entrée secteur DV24V, module de pesée personnalisé, deux entrées haute vitesse, chaque route 60 24V NPN fuite ,2DA 0-10V,le transistor par défaut à 8 axes,6 canaux 200kHz et 2 canaux 100K,6 canaux 200kHz et 2 canaux 100K,charge relais 3AAC220V contact sec,communication CAN personnalisée,10AD0-10 courant réglable,liste des accessoires,X1 Control Box,X1 air pump,X1 Touch Screen display,vous pouvez choisir les accessoires suivants pour votre utilisation,Schéma de procédé,EKUS,paquet de procédé,EEP,paquet de test,emballage infrarouge,emballage de flux,emballage infrarouge,emballage d'origine,emballage d'origine,emballage d'origine,emballage d'expédition,emballage infrarouge,emballage d'origine,emballage d'origine,EEP, (Foshan Zehet Technology Co., Ltd) est établi en 2015 à Foshan en Chine en facilitant le développement et la mise à niveau des solutions d'armes robotiques industrielles en Chine et en développant continuellement des applications étendues dans ce domaine. Depuis 2015, la société a commencé à se concentrer sur la recherche et le développement de l'économie intelligente petit industrie robot bras, éducation robot ARM.Certificate, exposition,
kword:2022 ventes à chaud bras mécanique /Teching /Petites et moyennes entreprises
Bras robotisé,bras robotiques,bras robotique pour l'homme,bras robotiques pour l'homme,bras mécanique,robotique Bras prothétique, bras Cyborg, bras robot imprimé 3D, bras robotique industriel, bras robot Arduino, hydraulique Bras robot,manipulateur robotique,bras robot de bricolage,bras robotique avec caméra,conception d'un robot ARM,bras robotiques pour la fabrication,Dobot Magicien,bras robotisé programmable,Mecademics,bras Delta





 Complaint
Complaint