
 Complaint
Complaint

1. Automated Célula de Bateria montar os requisitos de projeto
1.1,automatizado das células da bateria Montagem parâmetro técnico:
(1)A capacidade do equipamento: ≥10 ppm;
(2)A final excelente taxa for ≥ 99,8% (apenas os maus produtos causados pelo equipamento);
(3)Equipamento taxa de falha ≤ 2%;
(4)compatível com uma variedade de tamanho especificações do módulo de mudança rápida. Saída de laser estabilidade de potência (flutuação) ≤±1%, a distância focal do galvanómetro podem ser exibidos digitalmente e ajustados, o intervalo é de -5.0~+5.0mm, e a precisão de ajuste for ≤0,5mm;(5)A solda via é editado por soldagem de software, o processo de solda é automatizado, os parâmetros podem ser modificados, e o funcionamento e a autoridade de modificação pode ser definido
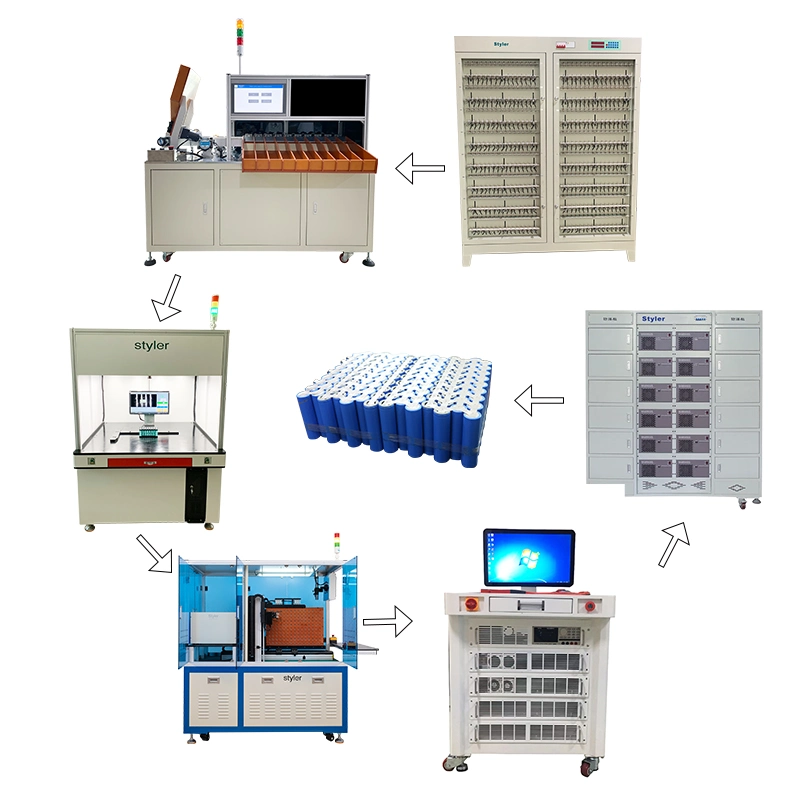
1.2,Fluxograma:
Tentativa de fluxo do processo, sujeitas a requisitos reais
2. Layout do programa
2.1 renderizações de programa:
2.2 Tamanho do Layout:
Novamente o tamanho do layout(L*W*H:19500mm*9000mm*3200mm
Layout dianteiro size(L*W*H:13000mm*6000mm*2300mm
3. Módulo de função Introdução
3.1 Ceaning Estação de colagem
3.1.1 Descrição do equipamento:
Introdução de limpeza e estação de colagem: 1. Depois de o trabalhador coloca a célula de bateria de alimentar o tapete, o equipamento pode completar automaticamente a seco e a colagem; 2. Batimento do equipamento: 12ppm;
3.1.2 Parâmetros do equipamento:
Nome | Parâmetros |
Fonte de alimentação | AC220V/50 Hz |
Alimentação de Ar | 0,5-0,7Mpa |
Size | L2600mm*W1250mm*H1800mm |
Temperatura de trabalho | 5-40ºC |
Intervalo de limpeza | X/Y(mm):300/300mm |
Gama de colagem | X/Y(mm):300/300mm |
Velocidade de deslocação | X/Y/Z(mm/set):300mm |
Precisão de repetição | ±0,02 mm |
Peso | Cerca de 650kg |
Relação de cola | 1:1 |
Mix de AB | A mistura dinâmica |
Precisão de colagem | 0,02g,a taxa de erro não deve exceder ± 5% |
Sistema do robô | 4 BORUNTE Robô do eixo |
Modo de funcionamento | Ponto-a-ponto/contínuo segmento de linha |
Sistema de colagem | HY |
Sistema de Controle | HY |
Componentes pneumáticos | Airtac |
Servomotor | A Panasonic Sistema do Servo |
Os sensores fotoeléctricos | Omron |
Power | Significa bem,HENGFU |
Parafuso esférico | O TCE |
Guias lineares | HIWIN |
Frame | Fangtong mecanismo de soldagem,bancada de soldadura Bloco de ferro, moagem do gantry |
Folha de metal | Folha de metal totalmente a estrutura fechada, Janela transparente |
Entre em contato conosco para obter mais informações de linha de montagem.
3.2 empilhar as mesas rotativas
3.2.1 Descrição do fluxo de ação:
1. Processo de acção: o robô de empilhamento descarrega e descarrega materiais do equipamento de colagem da linha do transportador, e executa as operações de empilhamento na série-seqüência paralelo das receitas do módulo. Este método de Empilhamento flexível pode acomodar as combinações de módulos com diferentes receitas em série de sequências paralelas. A seqüência de empilhamento é de baixo para cima, e as células e placas isolantes são alternados, a partir de 1 lado célula para o 1o lado da placa isolante, e depois para o último lado 1 célula. Durante o processo de empilhamento, pressionando para baixo e batendo mecanismo é simultaneamente pré-pressionado e fixo.
2. A garra é controlada pelo robô para controlar o mecanismo de retenção e a garra é projetado com a indução fotoelétrico células no lugar. O módulo de plataforma de empilhamento adopta uma dupla de declive da estação de design. Cada estação contém as braçadeiras duplas, o que pode colocar duas células ao mesmo tempo. Quando uma estação é o empilhamento, a estação B de forma síncrona executa o trabalho em movimento antes de extrusão, e a estação de duplo suplentes, de forma a melhorar a eficiência de empilhamento e em movimento.
3.2.2 A Estratégia de Transição explicou:
1. Alterar a garra da célula: escolha um longo fim de curso do cilindro de aperto, o que pode ser automaticamente compatível com diferentes tipos de células quando alterar;
2. Alterando a garra da placa isolante: ventosas conjunto está instalado sobre o perfil de alumínio e a distância entre as ventosas pode ser ajustado manualmente de acordo com a largura da placa isolante ao mudar o modelo.
3. Programa elétrico: de acordo com o número de série paralelo a seqüência de empilhamento de módulos compatíveis, o robô executa a operação de empilhamento de acordo com a predefinição robô seqüência de empilhamento de programa. Antes de mudar o modelo, o programa de empilhamento do modelo de mudança de produto é transferido.
3.3 O módulo de Função introdução
3.3.1 A estação de Extrusão: fileiras duplas de processo do módulo
3.3.2 A estação de Extrusão:
3.3.3 A estação de Extrusão: fluxo de equipamentos descrição:
1. Coloque as células colada pelo robô para a posição de descarga da mesa móvel e a mesa deslizante desliza automaticamente para a posição de extrusão;
2. Anexar manualmente as duas extremidades da placa da extremidade, instale os trilhos laterais, primeiro pressione o sentido da largura do botão de extrusão para tornar o sentido do comprimento do módulo horizontais; pressione a extrusão botão Iniciar , o cilindro acciona a chapa superior para extrusão de célula, quando ele atingir o comprimento de ajuste, ele pára, insere a correia de aço, murros o plástico da correia de aço e rives parafuso;
3. Depois que a instalação for concluída, pressione o botão abrir, aperte o cilindro para retrair, e em seguida pressione o botão deslizante, o módulo instalado desliza para a posição de descarga novamente e o robô disputa para o carrinho estacionária.
3.3.4 A estação de Extrusão: Estratégia de Transição explicou:
As ferramentas de extrusão de instruções de Transição
1. Mudar de manuseamento de pranchas: Servofreio parafuso + mecanismo de aperto é aprovado e o programa elétrico pode ser alternada com uma chave durante a mudança de modelo;
2. Tabela de extrusão alterar: escolha um longo fim de curso do cilindro de aperto, o que pode ser automaticamente compatível com diferentes tipos de baterias quando alterar;
3. Programa do Robô: de acordo com o tamanho do módulo compatível, o robô seguirá o robô pré-programa de tratamento. Antes de mudar o modelo, transferir o programa de manuseio do produto de substituição.
3.4 Introdução da barreira de segurança:
3.4 Introdução da barreira de segurança:
1. A concepção, o fabrico e o controlo da barreira de segurança conformes com as regulamentações nacionais em matéria de segurança de produção para garantir a segurança do processo de produção.
2. As cercas protetoras, vedações, redes de segurança e outras facilidades estão configurados nos lugares onde o homem ou danos à máquina podem ocorrer, e necessário do intertravamento de proteção é efectuado. A porta de segurança cadeado deve ser intertravado com o sistema. A porta de segurança é auto-bloqueio e não pode ser aberta quando a linha de produção está a trabalhar.
3. Inserir a porta de segurança do processo de operação: aplicável para a entrada - o robô e outros equipamentos estão estacionados em uma posição segura - a porta de segurança é aberta - insira a porta de segurança.
4. Processo de operação para a retomada da produção: vá para fora da porta de segurança - confirmar que não há ninguém na área de equipamentos - fechar a porta de segurança, digite a senha de recuperação e a porta de segurança é travamento automático - o equipamento esta funcionando normalmente.
3.5 Isolamento resistir a tensão da estação de teste:
O teste de isolamento antes da soldagem é feita pressionando todas as sondas através de todo o mecanismo de teste e depois alternando entre a célula e célula através do relé. Teste de isolamento entre a Shell e a Shell; procedimento de teste: todos os pólos positivos em série, todos os pólos negativos na série após o teste de isolamento entre os dois, e então todos positivos.
Teste de isolamento entre o pólo series e alojamento, teste de isolamento entre todo o pólo negativo da série e alojamento.
3.6 Isolamento suportar voltage test station:descrição detalhada do equipamento:
1. Processo de operação: a bandeja é levantada e posicionada, a shell sonda é pressionado para a placa de extremidade ou placa lateral e a sonda positiva os relés de todas as células são fechadas, de maneira que haja isolamento entre o eletrodo positivo da célula e o reservatório; o eletrodo positivo de todas as células se dividem em dois grupos, um estranho-numerados de grupo e um grupo de pares e testar o isolamento entre os eletrodos positivos.
2. Modelo de estratégia de substituição: de acordo com o arranjo das células correspondente ao arranjo de paletes, estabelecer um sistema de coordenadas para as coordenadas da fórmula pular a etapa. Antes de mudar o modelo, chamar o teste saltar coordenar o programa, efectuar a primeira peça teste OK e vá para o modo de produção após a mudança do modelo.
3.7 Pólo estação foto:
Introdução do pólo estação foto:
1. Esta estação primeira leva a marca do módulo e, em seguida, toma cada pólo;
2. Em seguida, vincular a informação da fotografia com o código do módulo e envie para a soldadura a laser.
3.7.1 Detalhes de Equipamento:
1. O equipamento é composta principalmente de tridimensional de tabela, CCD e fonte de luz, tampa de cremalheira, código automática pistola de digitalização;
2. Processo de acção: Após o módulo é levantada e transferido para o pólo fotografar estação através de dupla velocidade de corrente, o 3D fase identifica o modelo do módulo de acordo com o código de barras capturado pelo código automática pistola de digitalização. Encontre a posição e depois dispara 2 marcar pontos sobre a placa de extremidade. Após o posicionamento está concluída, ele irá constituir um sistema de coordenadas, que será enviado para a estação de limpeza e o posto de soldadura através do PLC e a bandeja de ferramental fluirá para a próxima estação após decrescente.
1. As três dimensões unidades fase a câmera e variando o sensor para tirar fotos e abrangente, que pode realizar a captura de falsa, o diâmetro e a retidão.
2. Use o gabarito que correspondem a cerca de localizar a posição do produto, e então use uma circular com a ferramenta de medição para determinar o centro dos dois círculos dentro e fora do anel de pólo para soldagem de posicionamento.
3. Método de trabalho: palavra fotografar estaticamente conclui a medição e posicionamento, compatível com cobre e materiais de alumínio.
3.8 Pole Position da estação de limpeza
Introdução do pólo da estação de limpeza: esta estação usa robôs e lasers para limpar os postes;
3.8.1 Detalhes de Equipamento:
1. O equipamento é composta principalmente de seis grandes partes: robô, CCD e fonte de luz, o capô, caixa de código de barras a pistola, telémetro e galvanómetro;
2. Processo de acção: Após o módulo é levantada e transferido para o laser da estação de limpeza através de duplo cadeia de velocidade, o robô reconhece o modelo do módulo de acordo com o código de barras capturado pelo código automática pistola de digitalização e o programa do robô ajusta automaticamente a altura e depois executa a medição de distância e marque o ponto da fotografia. Após a fotografar é concluído, cada pólo é limpa automaticamente de acordo com as coordenadas enviadas pela pole fotografar. Após a limpeza estiver concluída, a bandeja do ferramental desce e flui para a próxima estação.
3.9 soldadura a laser stationSoldadura a laser station introdução:
1. Esta estação primeira leva a marca do módulo e, em seguida, calcula o desvio de cada pólo com base nos dados enviados pelo fotografar estação;
2. Todos os barramentos de posições de soldagem são medidos para distância e soldadura a laser é realizada.
3.9.1 Detalhes de Equipamento:
1. O equipamento é composta principalmente de seis partes: tridimensional de tabela, galvanómetro, CCD e fonte de luz, rack capô, código automática pistola de digitalização e o telémetro;
2. Processo de acção: Após o módulo é levantada e transferidos para a soldadura a laser estação através de dupla velocidade de corrente, o tridimensional de tabela identifica o modelo do módulo de acordo com o código de barras capturado pelo código automática pistola de digitalização e a três dimensões programa mesa ajusta automaticamente a altura e depois executa variando e marcar pontos. Tire fotos. Após as fotos serem tomadas, barramentos de soldadura é efectuado de acordo com as coordenadas enviadas pela pole fotografar. Depois de a soldadura é concluída, a bandeja do ferramental desce e flui para a próxima estação.
3.10 Cantilever mecanismo da grua
3.10.1 A explicação das estratégias de transição:
1,substituição do Espalhador descrição da estratégia:
1. O pino do gancho: substituição do pino de engate e a placa de conexão precisam ser manualmente substituídos de acordo com diferentes modelos de módulos;
2. Mudança na direção do comprimento: o comprimento correcto é compatível e o bloco de conexão pode ser ajustada directamente sobre o perfil de alumínio manualmente.
3.11.1 Palete Introdução: Estratégia de Transição explicado
1. Substituição de paletes descrição da estratégia:
1. Direção de largura digite change: alterar manualmente a posição do encosto lateral (a placa inferior da bandeja serão pré-fabricadas com diferentes tipos de furos);
2. Alteração no sentido do comprimento: substituir manualmente a posição do slot da placa do bloco dianteiro diretamente.
Aplicação da indústria
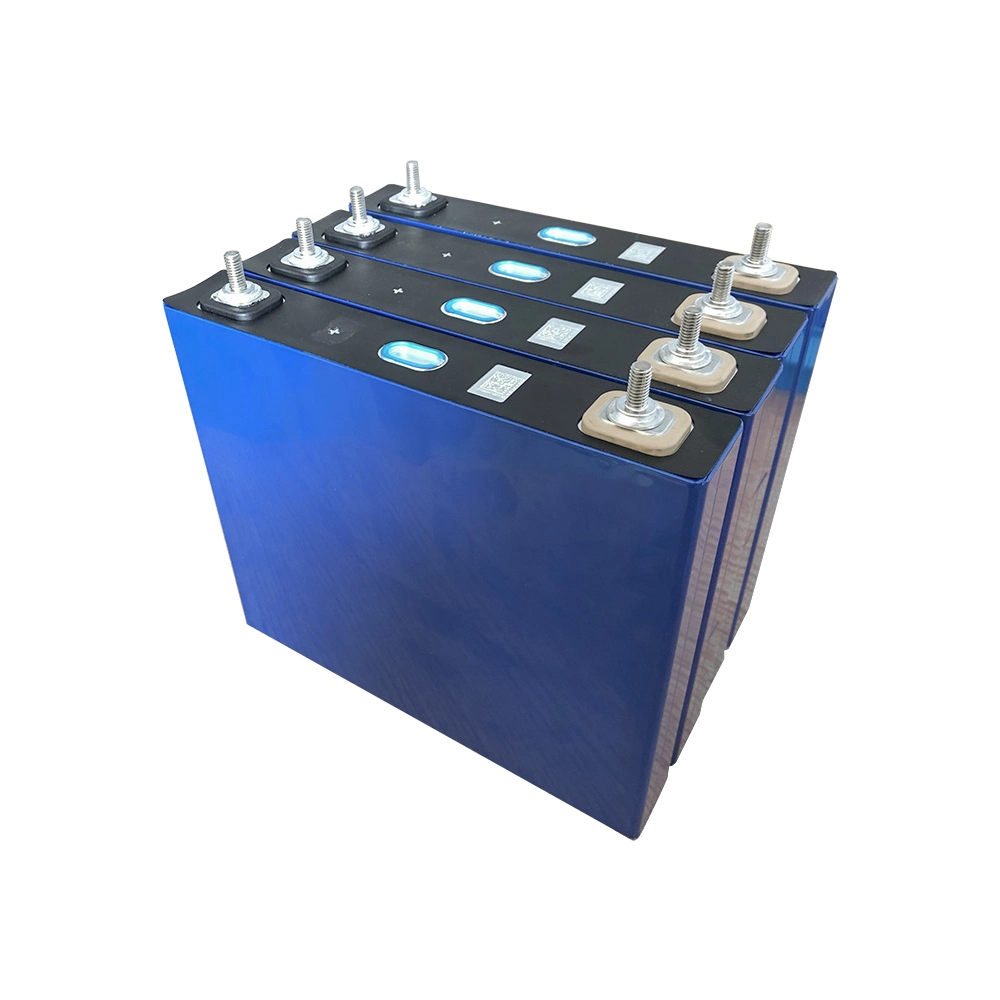
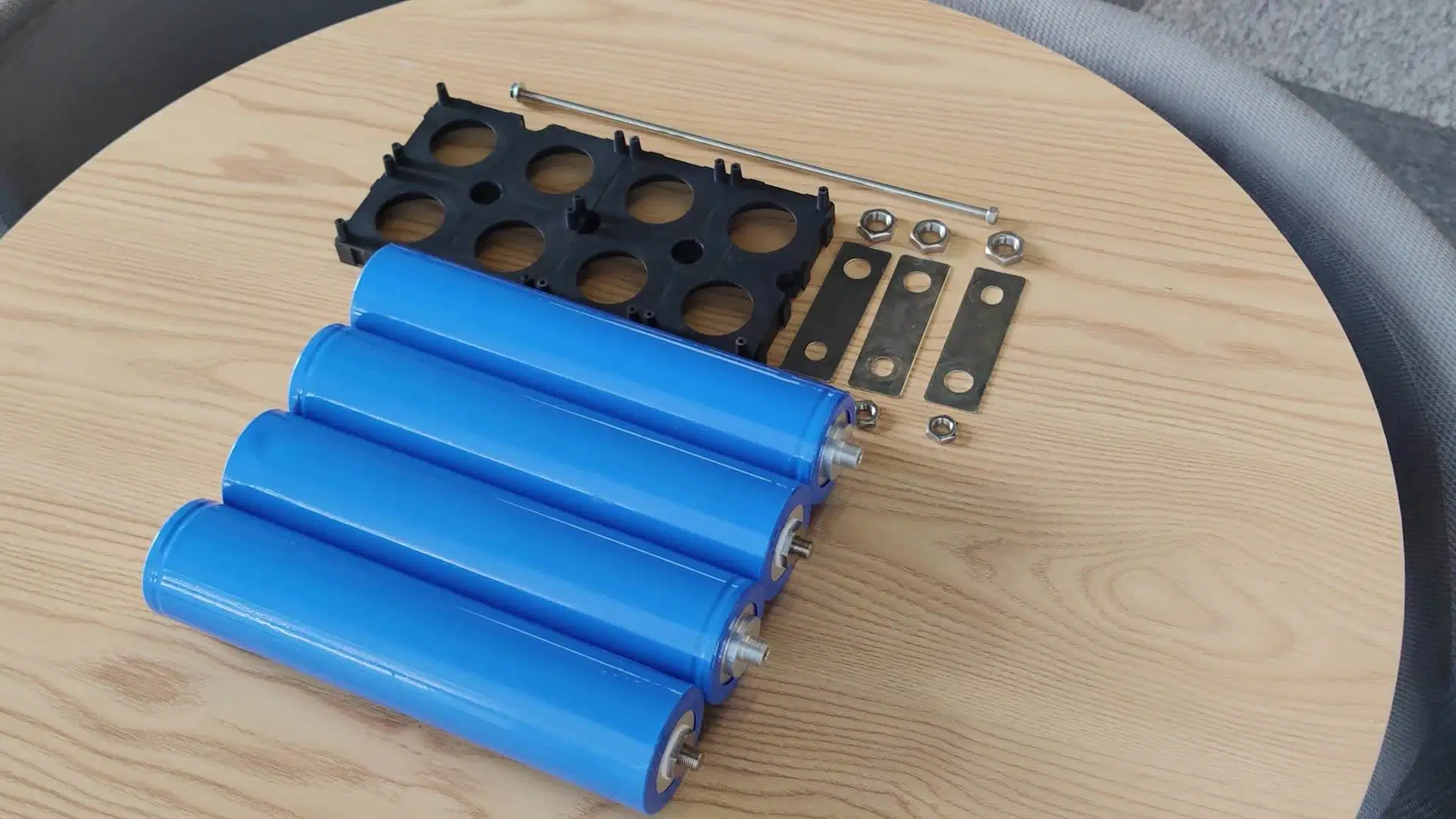
Bateria de lítio totalmente o módulo de montagem automática de linha é utilizada principalmente na produção de energia nova bateria de lítio, módulos de bateria prismática, módulos de armazenamento de energia dos módulos de bateria, fonte de módulos de bateria e pack do conjunto de solda, etc
A nossa empresa