Description
descrição do Produto
BRAÇO ROBÓTICO DE SECRETÁRIA EDUCACIONAL
Sistema inteligente de formação de soluição de ordenação visual AI
NO ITEM. ZKBOT-301ED
O nosso braço robótico de educação
É carregado abaixo de 0,5kgs de 3 eixos e 4 eixos instrução braço robótico. Cada vez mais instituições de ensino estão a comprar o nosso braço robótico de educação, que permite aos alunos aprender os princípios da ciência, engenharia, programação, inteligência artificial e automação, e melhorar as suas competências técnicas, pensamento, criatividade, trabalho em equipa e competências para resolução de problemas. Eles ajudam a avançar seu caminho futuro de carreira. Atualmente, nossa empresa produz 3 tipos de braços robóticos para o ensino, por favor, consulte os seguintes parâmetros.
Sistema de treino de ordenação automática do peso do robô
1. Função e descrição:
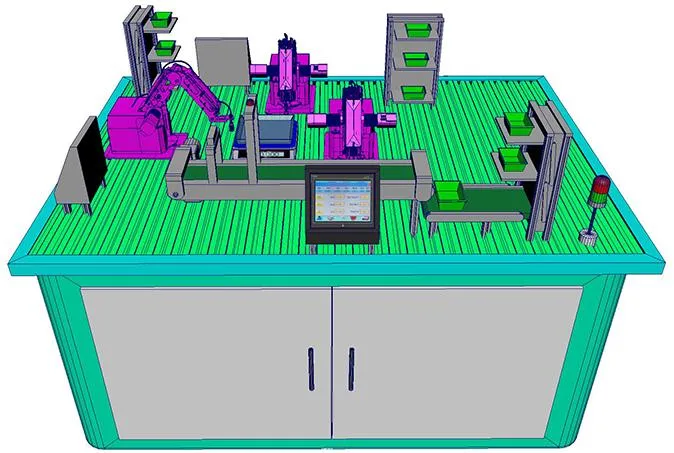
1.1 composição e função do sistema
O sistema de treinamento automático de classificação de peso do robô inclui tecnologia de robô, tecnologia de detecção de sensor, tecnologia de programa PLC, comunicação 485modbus e outras tecnologias.
O sistema é composto por uma combinação de vários módulos de funções de treino, há um módulo Robô: Composto por robô, grampo terminal, sistema de controlo do robô e ecrã táctil de ensino.
módulo do robô:
é composto por robô, grampo terminal, sistema de controlo do robô e ecrã táctil de ensino.
Módulo da correia do transportador:
O módulo da correia transportadora é construído com perfis de liga de alumínio e a correia está instalada para transmissão. As placas de chapa metálica são fixadas em ambos os lados da correia e a estrutura é firme.
Parâmetros técnicos da correia transportadora:
L 1000 mm * L 280 mm * a 800 mm; velocidade máxima: > 3 m/min
Uma variedade de módulos de fechamento final:
agarrado à mão, ventosa, etc.
Módulo de controlo principal do PLC:
É composto principalmente por controlador PLC, caixa de controlo, etc. o controlo ZK3U PLC é utilizado para controlar cada módulo funcional.
Módulo de balança electrónica:
(1) a precisão é de 0,1 g.
(2) suporte a comunicação modbus-RTU, peso de objeto legível, estado de equilíbrio.
Módulo do sensor:
sensores fotoeléctricos, contando peças de trabalho e posicionamento.
Outros:
Caixa de controlo principal, peças de diferentes tamanhos, linhas de comunicação online.
Nota:
O robô industrial padrão para aplicações de estação de trabalho é ZK-BOT301Ed e também pode ser substituído por produtos de carga semelhantes da marca ZEKEEP. Este dispositivo é uma linha de produção de monitores de ensino e formação e o produto mecatrónico mais típico. É desenvolvido para faculdades e universidades, faculdades profissionais e instituições de ensino e formação profissional. É adequado para robôs industriais, mecatrónica, automação elétrica, etc. ensino e formação profissional. Foi especialmente concebido para fins de ensino e formação, com base na proximidade do local de produção industrial e de fabrico, o que reforça as capacidades de instalação e depuração da mecatrónica.
3, Introdução ao módulo do sistema:
Nota: As fotos e fotos de cada módulo são para referência, a forma e o tamanho podem ser ligeiramente diferentes, e a correspondência de produtos deve prevalecer.
3.1 módulo do Robô
O módulo adota o manipulador de ensino ZK-BOT301Ed, a caixa de controle do robô e a tela de toque de ensino.
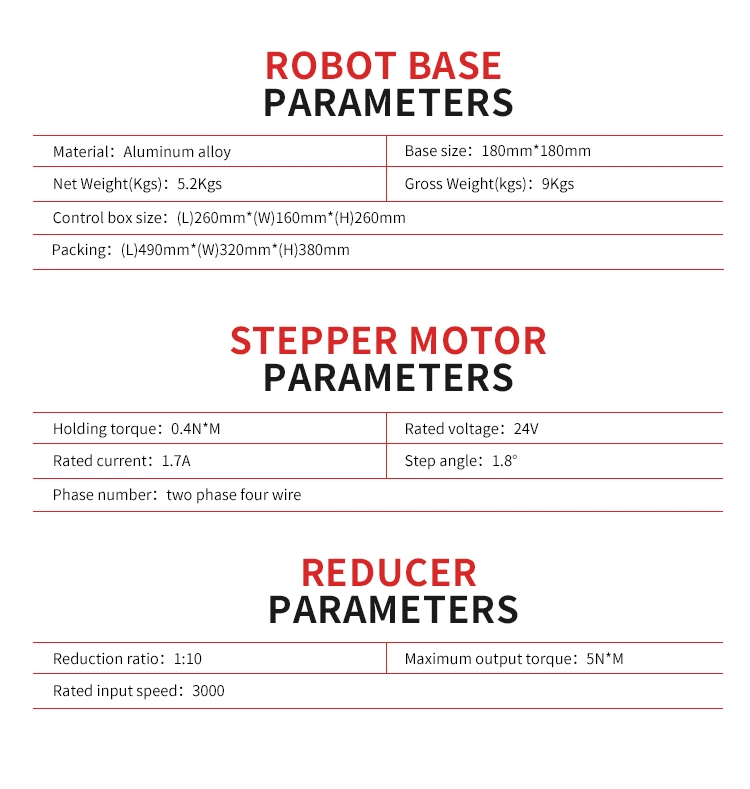
parâmetro técnico:
Dimensões (CxLxA) 1700X1200X750mm formato inferior: Pés e rolos ajustáveis
3.2 módulo de robô industrial
O módulo é composto pelo manipulador de ensino ZK-BOT303Ed, base, ferramenta de pinça final, sistema de controlo do robô e Teach Pendant.
1. Conjuntos ZK-BOT303Ed * 4
(1) estrutura do manipulador: Feita de 6061 materiais anodizados em liga de alumínio, equipada com 3 motores passo-a-passo bifásicos industriais, 3 redutores de engrenagem helicoidal 1:10, 15 minutos de folga de arco, esta manipulação é um manipulador de 42 motores passo-a-passo do modelo de ensino de três eixos, E abrir o protocolo de controlo do manipulador (protocolo de porta série), os utilizadores podem desenvolver o manipulador duas vezes, fácil de utilizar, que pode ser utilizado para paletização, desmontagem, estomagem e manuseamento, e pode suportar linha recta ponto-a-ponto, linha recta ponto-a-ponto, linha recta para linha recta, etc., SAÍDA DO, ENTRADA DI, incluindo coordenadas mundiais, ou seja, pode ir em linha reta para cima e para baixo.
O protocolo de controlo também pode suportar o openMv, câmaras industriais USB, etc. para desenvolver cenas visuais, interacção visual, identificar o tamanho e a posição dos objectos e transportá-los e ligar dispositivos externos, que podem ser utilizados para pequenas produções industriais. Este braço robótico também está equipado com um computador anfitrião operativo, que é fácil de utilizar e rápido de começar. Suporta três receitas principais do utilizador e números programáveis de 50 passos, o intervalo máximo de diâmetro telescópico é de 300 mm e a carga máxima é DE 0,5 KG. É frequentemente utilizado no ensino e desenvolvimento e aplicação de banco de teste.
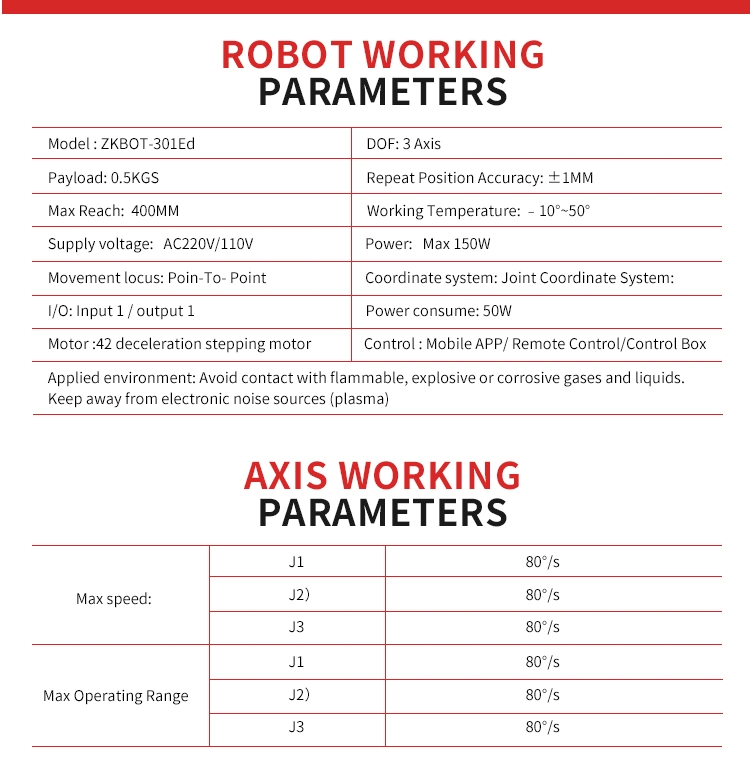
2) os parâmetros específicos do braço do robô
(3) caixa de controlo do braço do robô * 4: O controlo principal adota uma MCU de 32 bits e o dispositivo de ensino adota um ecrã tátil industrial; a caixa de controlo está equipada com UM VALOR de comutação DE 2 vias DI, 2 vias DO, que pode ser ligado a sensores fotoelétricos e válvulas solenoide industriais; O ensino do dispositivo suporta a interface de operação chinesa, com coordenadas conjuntas e apresentação de coordenadas mundiais; o controlo principal suporta o armazenamento de até 3 grupos de programas de utilizador, cada grupo de programas de utilizador pode armazenar até 50 passos e cada passo pode ser modificado introduzindo coordenadas; Este braço robótico é um braço robótico de secretária de três eixos que suporta o desenvolvimento secundário dos utilizadores, que pode ser utilizado para o manuseamento, pode suportar topoint de ponto a linha, linha a linha, etc., caminhada em arco, SAÍDA DE DO, ENTRADA DE DI, incluindo coordenadas mundiais. Os clientes podem desenvolver a impressão 3D, a gravação a laser e outros periféricos por si próprios (o computador anfitrião tem de escrever por si só). Escrever software interactivo (é fornecido software de escrita), interacção visual (é necessário desenvolver o computador anfitrião sozinho), e ligação externa ao equipamento, etc. carregar 1000G.
2. Parâmetros técnicos do braço do robô de ensino ZK-BOT303Ed:
Descrição de um único sistema de controlo de braço robótico:
1) sistema de controle
1.1 o host do sistema adota a nova tecnologia de controle de robô atual e modulariza o controle motor de passo do braço do robô, o sistema de controle do robô, a aquisição e comunicação de dados e a interface de hardware específica do robô, e os integra em uma caixa de controle. O sistema de controlo do braço robótico é compatível com o sistema de transmissão.
1.2 Investigação independente e desenvolvimento do controlo electrónico, forte e duradouro.
1.3 a interface externa inclui terminal IO e interface de fonte de alimentação externa.
2) Teach pingente A. Portátil Teach pingente B. tamanho: Cor 4.3 polegadas
3) Configuração básica do sistema A. compartimento integrado de controle de acionamento * 1 B. tela sensível ao toque de 4.3 polegadas * 1 C. motor: 42 motor de passo com codificador
3.4 módulo de armazenamento de artefatos de trabalho
Módulos de armazenamento automático de elevação de 4 camadas de 4 PCS, o tamanho é de 250 mm * 200 mm, utilizando uma estrutura de liga de alumínio, utilizando o controlo principal para controlar o número de camadas lógicas, incluindo o circuito do motor de controlo, cada camada do armazenamento de 4 camadas está equipada com sensores de infravermelhos, O que é conveniente para testar a caixa de teste se está no lugar, controlar o motor para girar depois que está no lugar, levantar automaticamente uma altura da caixa de teste, e esperar pela chegada da próxima caixa de teste.
(caixa de teste) (Módulo de armazenamento do elevador automático)
3.5 módulo de controlo principal do PLC
1) ZK3U PLC: 16 canais de entrada DC24V NPN. 16 canais de saída de transistor, carga de 24 V CC, máximo de 3 a (saída NPN saída de 4 canais de 200 kHz de saída de impulso de alta velocidade. A quantidade analógica (0-10 V) é de 10 canais AD, 2 canais DA.communication é 1 canal RS232, 2 canais RS485.
2) placa PCB online: Relé de 5 vias e isolamento de acoplador óptico de 6 vias, equipado com módulo de transferência RS485 de comunicação de escala electrónica de 1 via, módulo de transferência de comunicação DE 7 vias DE ENTRADA DI, módulo de conversão de saída DO24V de 6 vias;
3) Software do programa: GX WORKS2, GX Developer.
Módulo à escala 3.6
(1) a precisão é de 0,1 g (2) suporte modbus-RTU comunicação, peso de objeto legível, estado de equilíbrio
3.7 módulo do sensor
(1) Interruptor fotoelétrico normalmente aberto e normalmente fechado de 10 V NPN (2), conforme mostrado na figura:
3.8 módulo visual openMV
(1) processador STM32H74311 ARM Cortex M7, flash 480MHz1MBRAM2 MB, todos os 1/0 pinos com saída de 3,3V e tolerância de 5V. Este processador tem a seguinte interface: 1.
(2) Interface USB de velocidade total (12Mbs), ligue ao computador. Quando a câmara OpenMV está ligada, é apresentada uma porta com virtual e uma "pen USB" no seu computador.
(3) a ranhura para cartões USD tem 100 Mbps de leitura e escrita, o que permite que as câmaras MV abertas gravem vídeo e transfiram material de visão da máquina a partir do cartão SD extraído.
(4) um bus SPI com uma velocidade de até 100 Mbps, permitindo-lhe simplesmente transferir os dados de fluxo de imagem para a placa de expansão LCD, placa de expansão WiFi ou outros controladores
(5) um barramento 12, BARRAMENTO CAN e dois barramentos seriais assíncronos (TX/RX) são usados para conectar outros controladores ou sensores
(6) um ADC de 12 bits e um DAC de 12 bits
(7) 2/pinos para servo-comando seco: Todas as 10 portas podem ser usadas para interrupções e PWM (existem 10/o pinos na placa). (8) um RGBLED (três cores) dois LED 850mIRLED brilhantes (infravermelhos).
(9) SDRAM externa de 32 bits de 32 MB, relógio de 100 MHz, largura de banda de 400 MB/s.
(10) o quadríflash externo de 32 MB, o relógio de 100 MHz, o modo 4 bits DDR atinge uma largura de banda de 100 MB/s.
3.8 vários módulos de ferramentas finais
Ferramenta de pinça de extremidade do robô: Utilizando a marca LDX-335MG de caixa de direção digital, dedicada ao robô/manipulador, manipulador de longa duração/resistente a queimaduras, a ferramenta de pinça pneumática pode agarrar o sistema para armazenar a peça e enviá-la para a correia transportadora. Ferramenta de electroíman CC de 24 V tipo ventosa circular: A ferramenta de electroíman CC de 24 V tipo ventosa circular tem uma forte condutividade elétrica e a sucção forte é mais adequada para aspirar porcas diferentes.
3.9 módulo da luz de alarme:
Marca: THND Nome: Luz de sinal de três camadas modelo: D50-3-C (silencioso), D50-3-C-F (com sinal sonoro) Voltagem: DC24V Especificações: Sempre material brilhante e brilhante: PC com abajur, ABS base volume: Cerca de 85 dB tipo de som: Som contínuo
3.10 - módulo de contagem digital de tubos:
Modelo do produto: YL4-2.3JS Tensão de trabalho: DC12V com revestimento metálico tamanho: L230MMX H 118.5mmX T 35MM sem revestimento tamanho: L200MMX H 106mmX T23MM Sensor de suporte: Distância de detecção fotoelétrica do sensor 10cm-30cm, pode suportar outros sensores do tipo NPN, como Hall, metal, etc. instruções de uso: fácil de utilizar, o conjunto completo é fácil de utilizar, pode ser utilizada uma ficha na tomada de corrente eléctrica de 220v, principalmente utilizada para calcular os envios de peças e porcas de vários tamanhos.
3.11 módulo de interface de interação homem-computador:
Tamanho do ecrã: 7 polegadas modelo TPC7032Kx Painel plástico cinzento (variável) Resolução: 800 * 480 tamanho do painel: 226 * 163 abertura do armário: Abertura grande 215 * 152 frequência principal: 800 MHz memória: 128 M armazenamento: 128 M Interface de série: 1 * RS2322 * RS485 o ecrã táctil industrial é apresentado na figura:
3.12 partes separadas e ferramentas de regulação
O sistema está equipado com ferramentas de configuração completas e consumíveis de formação. A lista de configuração específica é a seguinte (a lista está sujeita ao modelo real do braço do robô): Um conjunto de ferramentas.
4. Parâmetros técnicos:
1. Fonte de alimentação em funcionamento: AC220V ± 10% 50HZ
2. Ambiente de trabalho: Temperatura - 10ºC - 40ºC humidade relativa < 85% (25ºC) altitude < 4000 m.
3. Capacidade do sistema: < 1000 W.
Tamanho: 1700 mm × 1200 mm × 750 mm 5. Peso do robô: 50 kg
5. O sistema conclui o projecto:
1. Ensine a Pendant Control o braço do robô para retornar à origem.
2. O Teach Pendant controla o experimento de corrida do braço robótico.
3. A experiência de movimento multi-eixo do manipulador controlada pelo dispositivo Teach;
4. O pendente de ensino controla o experimento de interpolação articular multieixo (sincronização de 3 eixos) do manipulador.
5. O pendente de ensino controla o braço do robô, o sensor fotoelétrico e outras experiências gerais de casos.
6. Experiência de programação do ecrã de toque.
7. Experiência de comunicação de e/S entre PLC e braço robótico.
8. Experiência de manuseamento de um único braço robótico.
9. Experiência online de vários braços robóticos.
10. Dimensão da porca de identificação visual mV aberta.
11. Desenho visual do openMv.
12. Abrir o reconhecimento visual mV para encontrar blocos coloridos.
13. Reconhecimento visual de mV aberto, rastreio do marcador de AprilTag.
14. Abrir a correspondência visual de modelos mV.
15. Abrir o modelo visual múltiplo mV. Correspondência.
16. Detecção de ponto de característica visual de mV aberto.
17. Intervalo visual mV aberto.
18. Reconhecimento visual de código de leitura de mV aberto.
19. Abrir a correspondência de modelos de cor mV e o reconhecimento ao mesmo tempo.
20. MV aberto diferenciam diferentes faces.
21. Leitura digital da contagem de tubos.
22. Implementar a função de alarme.
23. A placa de controlo principal comunica com o ecrã para realizar o visor de controlo da interface interactiva. 24. O quadro de controlo principal controla o funcionamento do módulo de armazenamento da peça de trabalho.
25. Experiência de separação automática de porcas.
6. Lista de configuração
1. Configuração da estação de trabalho:
|
Nome das peças |
Modelo |
Número |
Notas |
|
braço do robô |
ZK-BOT303ED |
4 |
Capitão 340 mm, motor 42 e redutor secreto |
|
caixa de controlo |
Caixa de controlo ZK-BOT303ED |
4 |
Contém MCU, tubo elétrico, placa de acionamento, todos os tipos de botões |
|
controlo PLC |
Controlo LED ZK3U PLC |
1 |
Contém PLC, fonte de alimentação. Placa adaptadora |
|
Linha de comunicação de controlo principal do PLC |
|
1 |
Comunicar com outros braços robóticos |
|
ecrã de toque |
ecrã a cores de 4.3 polegadas |
4 |
Toque em INPUT para alterar os parâmetros |
|
linha de comunicação |
fio de comunicação 9 pino 232 |
4 |
Comunicação entre o braço do robot e o ecrã táctil |
|
sensor de infravermelhos |
Comprimento 600 mm * largura 100 mm * altura 100 mm |
2 |
Altura ajustável, velocidade de 1-3 m/min |
|
Módulo de armazenamento de artefatos de trabalho |
CDD-4ON |
2 |
Altura de acordo com a depuração da caixa de teste |
|
Módulo da luz de alarme |
THND |
4 |
Para alarme de funcionamento |
|
Módulo digital de contagem de tubos |
YL4-2.3JS |
3 |
É utilizado para calcular a quantidade total de material e o envio de nozes |
|
balança eletrónica |
|
1 |
485 comunicação (protocolo modbus) |
|
Jogos de jiggling, e outros dispositivos elétricos |
|
4 |
Agarrar materiais |
|
Módulo visual |
Abre a MV |
1 |
Porca de separação |
|
Nozes, caixas experimentais |
|
1 |
O tamanho da porca |
|
armário de ferramentas |
|
1 |
ferramenta de substituição |
PERGUNTAS FREQUENTES
Q1: Os braços robóticos podem ser utilizados na indústria? Que funções podem ser?
A1: Carga útil máxima de 0,5 kg, pode ser utilizada numa linha de produção industrial leve, pode ser utilizada como ensino, ordenação, garra para os objetos.
Q2: Pode ser usado como um braço robô para ensinar ou treinar a organização? É possível suportar a fonte da caneta?
A2: Sim, este robô pode atender ao treinamento básico de ensino e aprendizado introdutório. Os nossos engenheiros têm uma vasta experiência em projectos de aplicação de robótica em grande escala. Com base nesta experiência, desenvolvemos um robô de baixo custo adequado para uma operação e ensino simples.
Apenas a base suporta API que pode ser desenvolvida duas vezes (coordenadas conjuntas e coordenadas mundiais), ensinar programação pendente, contexto multi-robô para controlar. O software de controle fornece demonstração do computador host labview
Q3: Pessoas que nunca aprenderam programação ensinar pode você controlar este robô?
A3: Sem problemas, o pendente de aprendizagem por toque é fácil de utilizar
P4: O trabalho de ciclo pode ser definido e as coordenadas podem ser definidas? A velocidade é ajustável?
A4: Suporte ao ciclo do nó de movimento em 150 etapas, você pode usar o Teach pingente para definir as coordenadas do nó de movimento, e a velocidade do movimento do nó e a velocidade geral podem ser ajustadas a qualquer momento.
Q5: Pode fornecer um documento técnico?
A5: Sim, nós fazemos. E é o inglês.
P6 qual é a linguagem que o seu sistema suporta?
A6 a interface do utilizador está em inglês.
P7 como resolver os problemas ao utilizar o produto?
A7 oferecemos suporte on-line gratuito.
P8 quanto tempo demora?. tempo de espera?
A8 normalmente, são cerca de 15 dias úteis. Se temos robôs em stock, podemos enviar imediatamente.
Q9 existe uma função de poupança de energia?
A9 Sim
Q10: O que onclui o sistema de reconhecimento de peso e o que faz?
A10: O sistema de reconhecimento de peso inclui em baixo
X4 conjuntos de braços robóticos ZKBOT-303Ed
X1defina a escala eletrônica
X2 Definir 1M correia transportadora eletrônica
X1 defina a caixa de controle principal (que pode contextualizar outra caixa de controle)
X1 defina o sensor fotoelétrico
X1 defina a câmara Visual
Q11: Qual é a necessidade de trabalho online com várias máquinas?
A11: É necessário cooperar com outros equipamentos na linha de produção para detecção por infravermelhos e agarrar objectos, escalas electrónicas para identificar a ordenação da qualidade, carga e descarga por infravermelhos, adequados para a cooperação industrial com várias máquinas, ensino de fabrico inteligente escolar, etc.
O nosso braço robótico de educação
É carregado abaixo de 0,5kgs de 3 eixos e 4 eixos instrução braço robótico. Cada vez mais instituições de ensino estão a comprar o nosso braço robótico de educação, que permite aos alunos aprender os princípios da ciência, engenharia, programação, inteligência artificial e automação, e melhorar as suas competências técnicas, pensamento, criatividade, trabalho em equipa e competências para resolução de problemas. Eles os ajudam a avançar seu futuro percurso de carreira. Atualmente, nossa empresa produz 3 tipos de braços robóticos para o ensino, por favor, consulte os seguintes parâmetros.



 Complaint
Complaint