 Complaint
Complaint

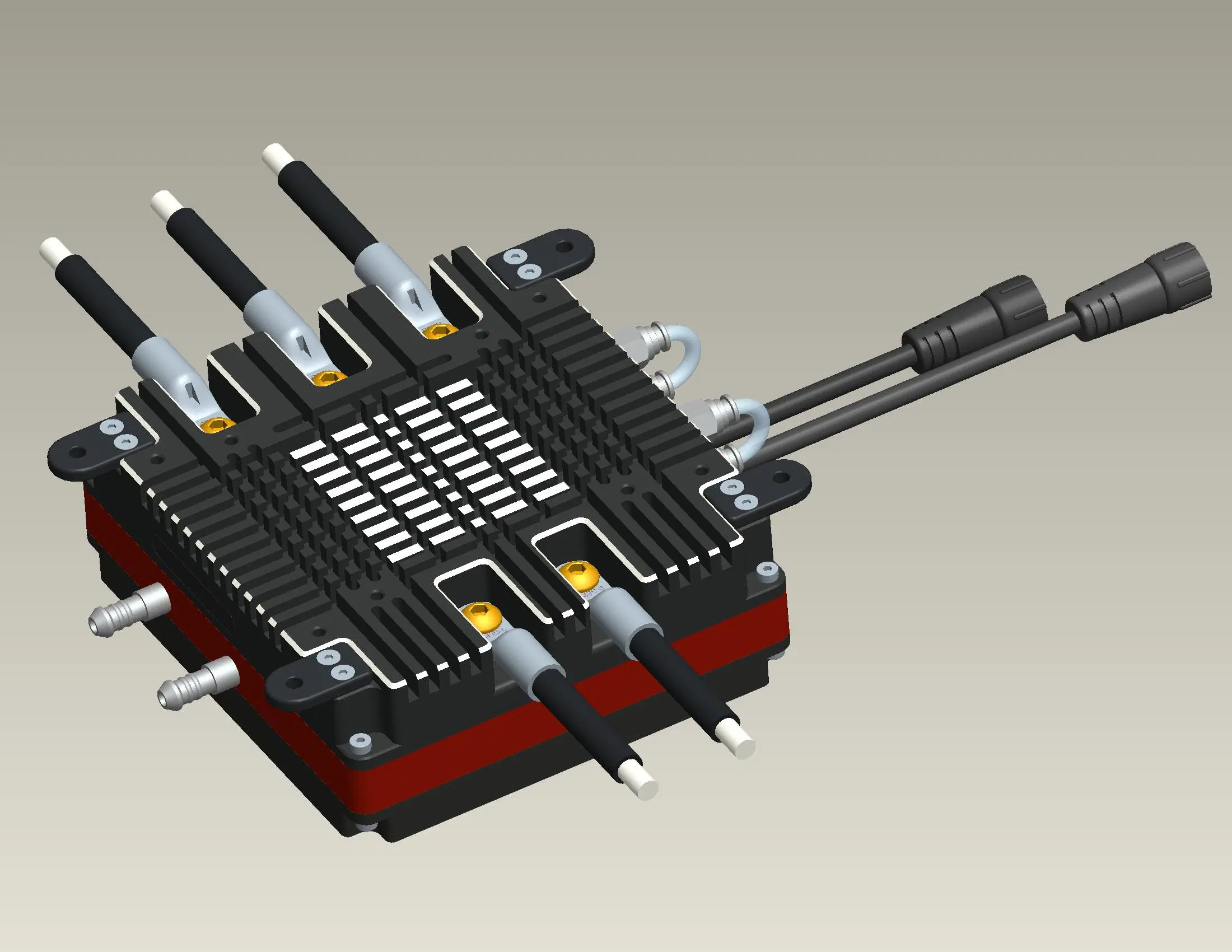
Obrigado por escolher a 200A 60V series Marine Electronic Controlador de velocidade (CES) series pela Quanly empresa concepção e fabrico.
Devido à alta velocidade de rotação do motor, a potência sem escovas system é uma poderosa dinâmica. O uso inadequado pode causar lesões pessoais, por isso recomendamos que você ler estas instruções antes de utilizar.
A empresa Quanly tem direitos para modificar seus produtos sem quaisquer notificações, incluindo a sua aparência e parâmetro de desempenho, requisitos operacionais etc; Quanly não faz quaisquer garantias, declarações ou compromissos. No entanto, não assume qualquer responsabilidade causada pela modificação dos produtos de terceiros; Quanly não assume qualquer responsabilidade decorrente da aplicação do produto, incluindo a indemnização por perdas directas ou indirectas.
| Modelo nº | 60V 200A-SL-WP | ||
| Max Corrente Contínua(A) | 200A | ||
| Max corrente trabalho(A) | 400A | ||
| Saída de BEC (V/A) | 5V/1.5A ,14V/200mA | ||
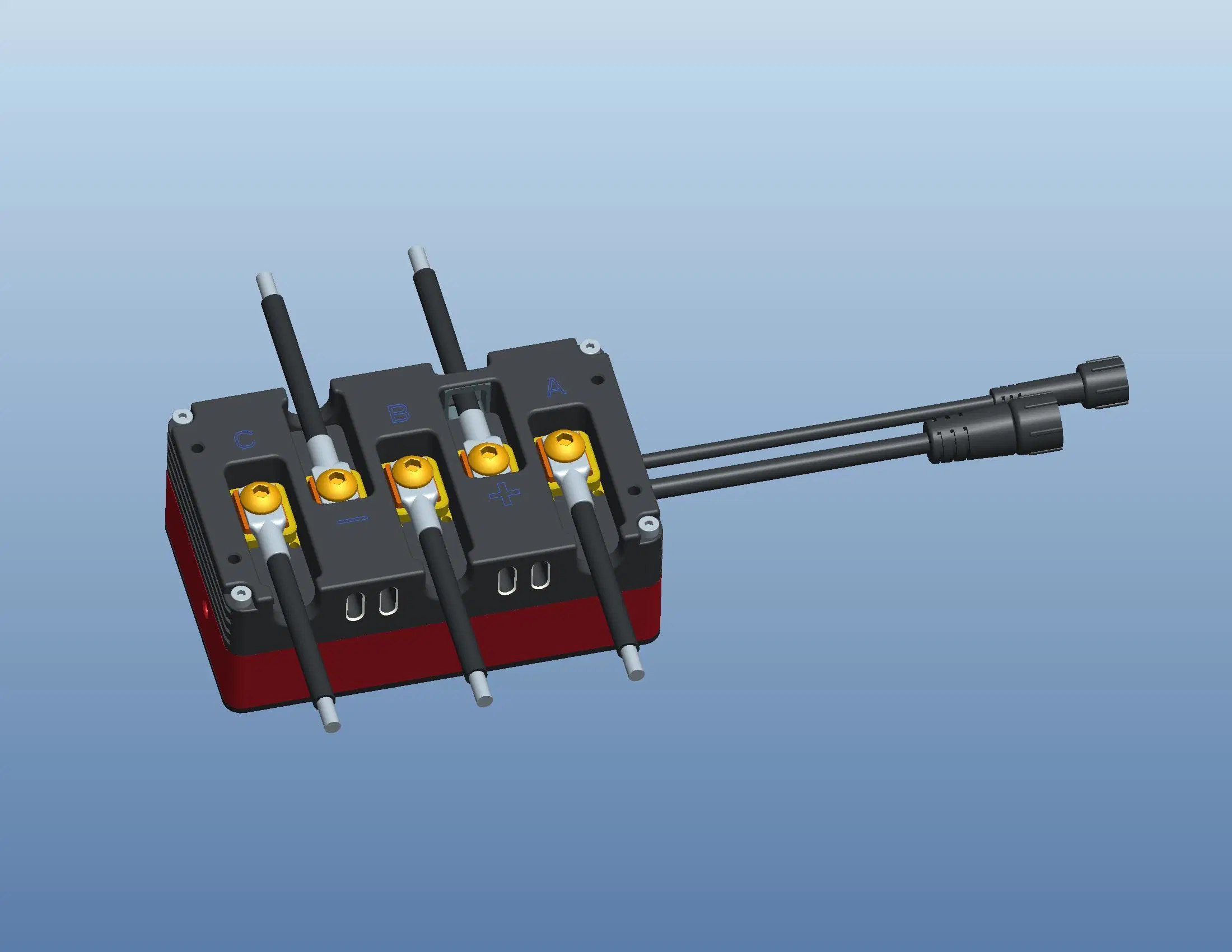
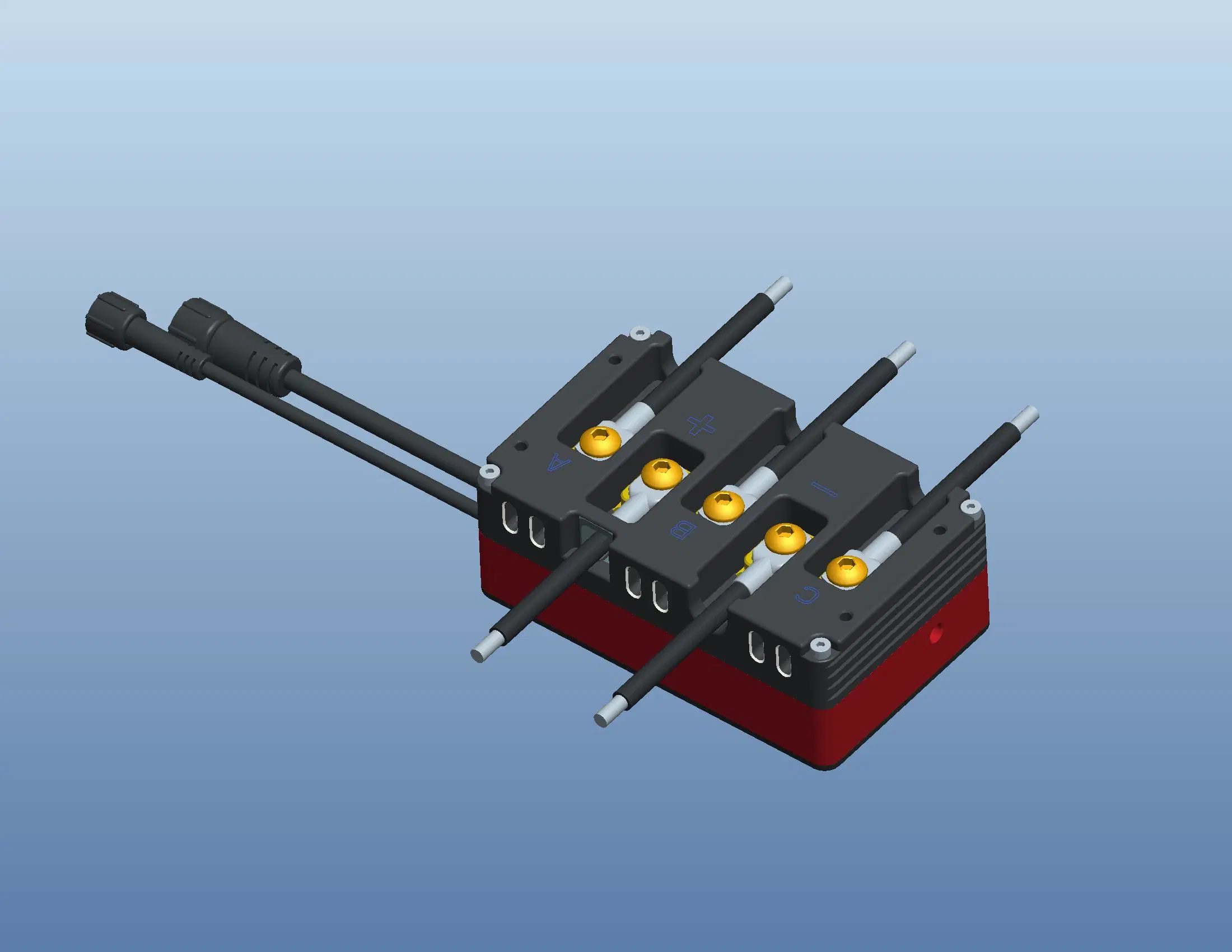
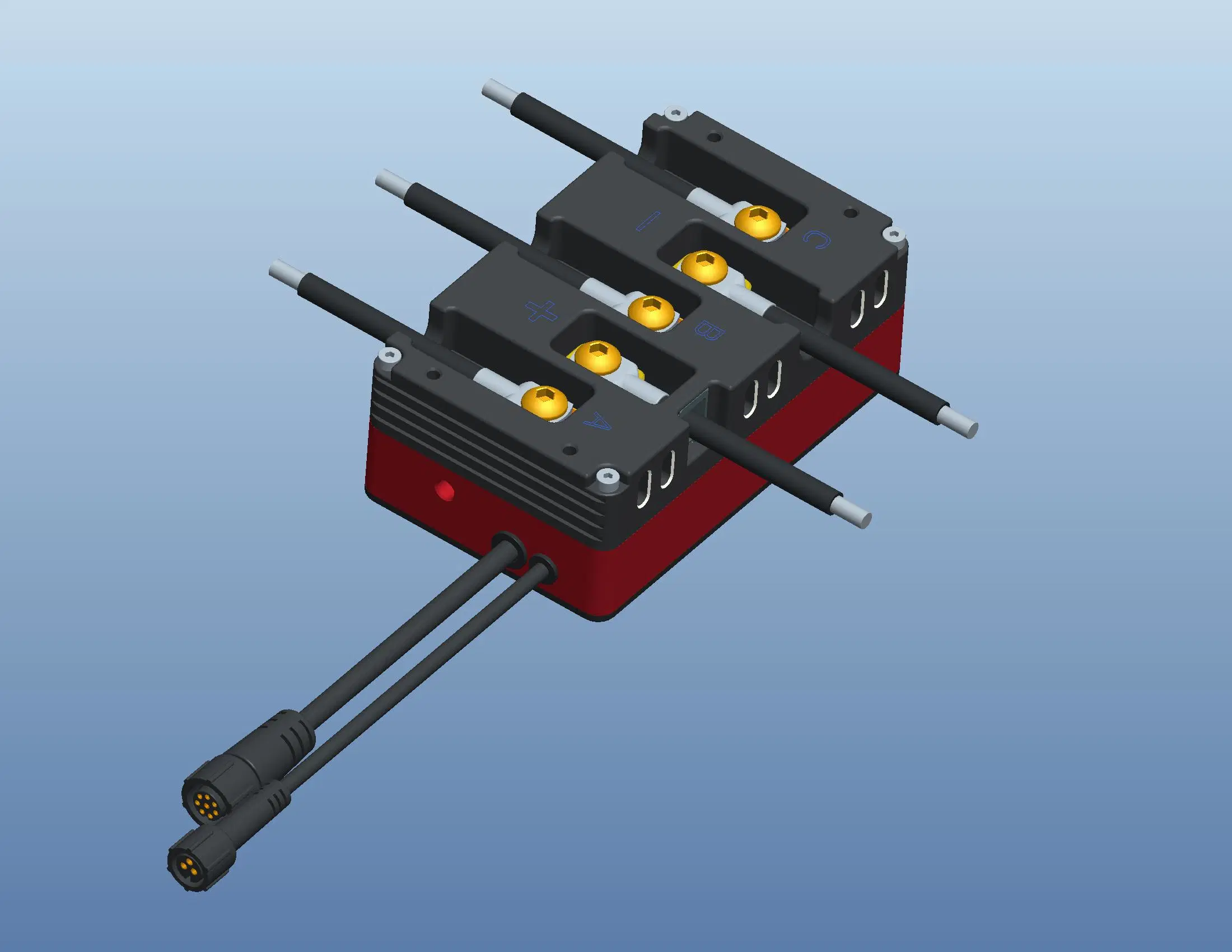
| Motor compatível | D65L161,D70L165,D85L134,D85L165, D65, D83 | ||
| Tensão de trabalho/Lipo Bateria(células) série | 30-60 V/10-14S LiPo | ||
| Peso líquido (kg) | 1,0 kg | ||
| Bitola do fio ao Motor | 6 AWG | ||
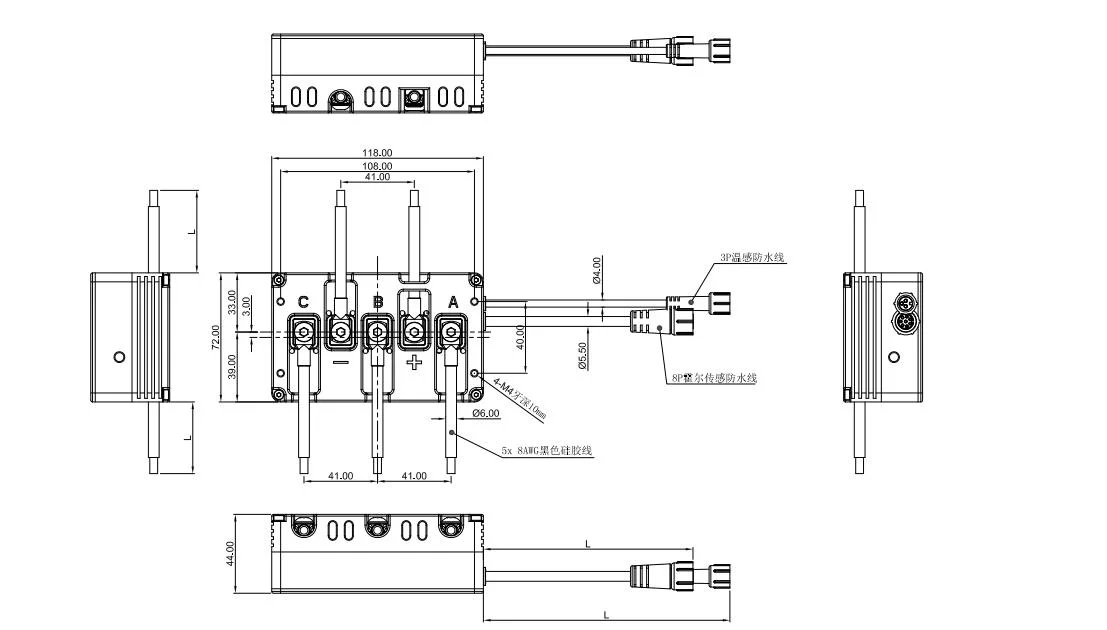
| A cota(mm) | L133*W80*H50 | ||
| Os fios para o receptor | 3 fios com conector impermeável | ||
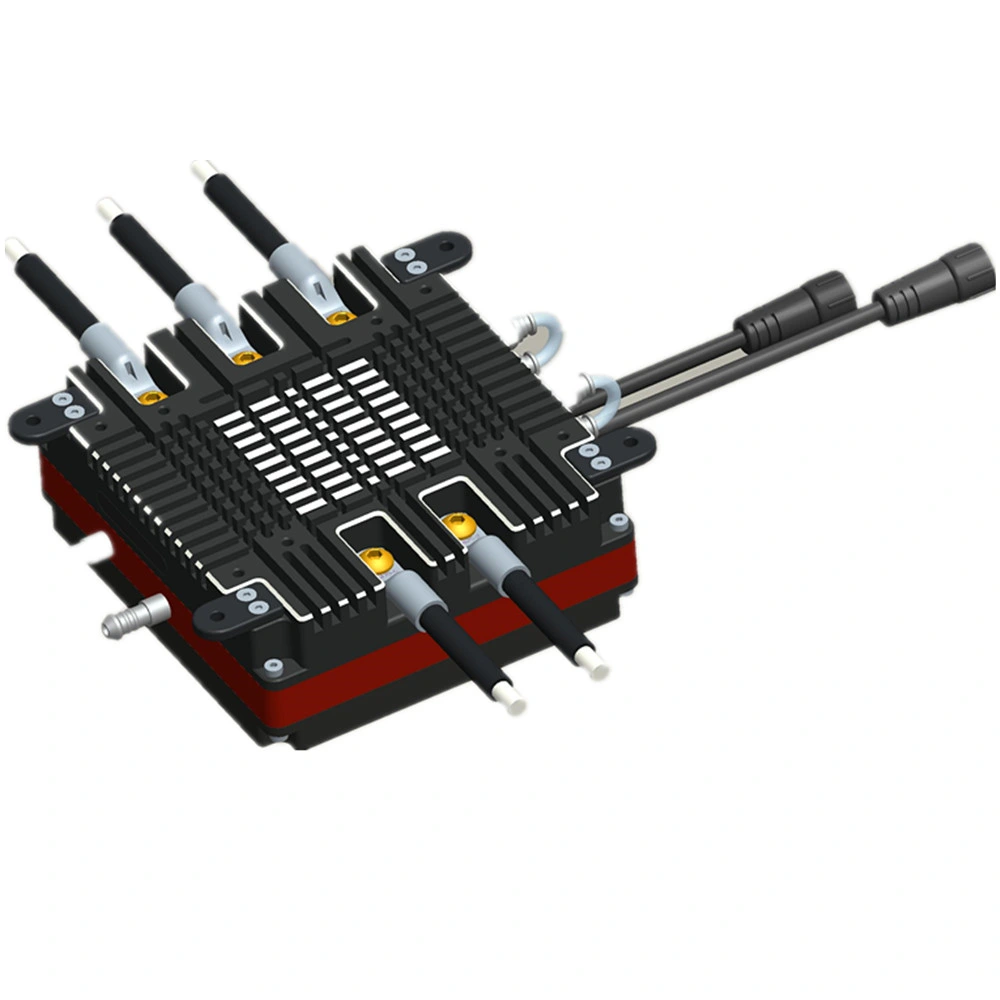
| Solução de resfriamento | Dissipador de calor e da placa de refrigeração de ar | ||
| Grau de IP | IP67 | ||
| Ces High Temp. Alarm | 100 graus centígrados/regulável | ||
| Alta Temperatura. Alarm | 100 graus centígrados/regulável | ||
| Sinal do Receptor | PPM,1-2ms | ||
Mínimo/Médio/Máximo valor borboleta, 1000/1500/2000 é as configurações de fábrica.
Este valor será alterado com o valor do controlador remoto quando calibrar o ajuste do acelerador manual .
Ces/Motor de Protecção de temperatura, quando a temperatura do CES/Motor exceder o valor ajustado CES reduzirá a velocidade por 50% e entrar em proteger o estado. Se desactivar esta função,CES vai continuar a trabalhar de acordo com a indicação do acelerador.
Força de Arranque
O ajuste de torque durante a inicialização. Quando o valor da configuração é grande, o torque de inicialização é grande e a velocidade inicial é grande. Pelo contrário, o torque de inicialização é pequeno e a velocidade é baixa.
Desligamento do Motor e bloqueado.
Quando o retorno do acelerador para a natureza e a configuração Desativar, o motor irá seguir a inércia e continue a girar. Quando a configuração abrir, o motor irá travar e parar a rotação imediatamente.
Desmagnetização compensações,
Quando o motor acelerar mais rápido e trabalhar em grandes corrente vai causar as bobinas do motor de desmagnetização durante um período prolongado e a rotação não é suave. Entretanto, é necessário desligar a energia da bobina para um momento e aguardar para bobinas para desmagnetizar. Este método permitirá reduzir a potência do motor.
| Parâmetro do programa | Parâmetro de Configuração | |||||||
| Modo de Operação | Para a Frente | Para a frente/ para trás | ||||||
| Rotação do Motor de direcção | CW | CCW | ||||||
| Transmitir a força do Acelerador | 20% | 40% | 60% | 80% | 100% | |||
| Inverta a força do Acelerador | 20% | 40% | 60% | 80% | 100% | |||
| Sincronização do Motor | Extremamente Baixa | Baixa | Condições normais | Alta | Extremamente Alta | |||
| Aceleração de revisão | Super Macio | Soft | Velocidade média | Velocidade Alta | Super Velocidade Alta | |||
| Tensão Baixa de protecção da bateria | Desprotegido | 3.1V/célula | 3.2V/célula | 3,3 V/célula | 3.4V/célula | |||
| A seleção de frequência) | Alta | Baixa | ||||||
| No mínimo o valor de posição da borboleta | 1000 | |||||||
| O máximo de valor de posição da borboleta | 2000 | |||||||
| Média do valor da borboleta | 1500 | |||||||
| Comité da Protecção de temperatura | Desligar | 80C | 90C | 100C | 110C | 120C | 130C | 140C |
| Desmagnetização indemnização | Desligar | Baixa | Alta | |||||
| Força de Arranque | 1.2.3.4.6 | 9 | 12. 18 | 25 | 37 | 50 | 62 | 75 |
| Desligamento do Motor e bloqueado | Desligar | Abra | ||||||
| Temperatura do Motor de protecção | Desligar | 95C | 100C | 105C | 110C | 115C | 120C | 125C |
1.Quando usando o tipo de pistola de controlador remoto (o CES o modo de operação definida para a frente/para trás), o curso do acelerador do método de calibração é o seguinte:
Ligue o controlador e empurrar para o máximo valor borboleta ,então ligue o CES e ouvirá o som dos motores como "DI DI" som .
Quando se ouve o som de "DI DI " durante quatro vezes , empurre o acelerador botão basculante para valor mínimo. Em seguida, ouvirá o som de"DI DI DI"sobre o motor e depois solte o acelerador para a natureza e ouviu uma especial confirmar sons, isso indica que a calibração configurar bem e salvar.
2.Quando usando a placa de controlador de tipo (CES modo de operação definida para o tipo de avanço), o curso do acelerador do método de calibração é o seguinte:
Ligue o controlador e empurrar para o máximo valor do acelerador e depois ligue o CES e aguarde dois segundos. Em seguida, irá ouvir o som dos motores como "DI DI"som, empurre o acelerador botão basculante para valor mínimo e ouvir o motor faz confirmar especiais som, ele indica o curso do acelerador configurado bem e salvar.
| Descrição de Falhas | Análise | Solution |
| Não há som a partir do motor depois de ligar | A tensão da bateria não foi a entrada para o CES ou os polos positivo e negativo são invertidos | Verifique se há uma conexão confiável entre a bateria e o CES. Se a soldadura não é bom, insira novamente o vendeu. Se os polos positivo e negativo são invertidas, por favor corta a alimentação imediatamente, caso contrário o CES será danificado |
| Após o motor ligar, o motor não pode ser iniciado, fazendo soar como "Di-di-"(Aviso acústico) | O pacote de bateria tensão não estiver dentro da faixa normal | Verificar a bateria a tensão |
| Barco RC não pode fazer o sentido para trás | O modo de funcionamento do CES não definição para a frente/para trás Digite o CES não conseguiu identificar o acelerador no ponto médio | Defina o modo de operação para a frente/para trás Re-Calibrate Tipo do curso do acelerador conforme descrito na página 1 |
| Quando a rotação do motor, perda de potência de repente | 1.o CES obtenha em baixa tensão da bateria proteger o estado 2.o comité ou o motor entrar em excesso de calor Proteger o estado | Substitua a bateria imediatamente. A temperatura do comité ou do motor for demasiado elevada, aguardar que a temperatura do CES ou motor acabando antes de usá-lo. |
| O motor não pode lançar,só pode agitar | 1.o cabo do motor e o cabo do CES não estão bem conectados 2.o comité ou o motor danificado | Inspecione cuidadosamente o conector para conexões mal Substituir o ESC ou o motor |
| O controlador remoto aumenta o acelerador na direção de avanço, mas o barco RC inverte | A seqüência de conexão entre o CES e o cabo do cabo do motor está errado | Fixado um fio do motor e um fio CES,alterar outros dois fios. |