Description
описание продукта
НАСТОЛЬНЫЙ ПК ДЛЯ ОБРАЗОВАТЕЛЬНЫХ УЧРЕЖДЕНИЙ, РОБОТИЗИРОВАННАЯ РУКА
Интеллектуальная система визуальной сортировки, обучающая растворению
НОМЕР ЭЛЕМЕНТА . ZKBOT-301ED
Наше образование роботизированная рука
Он загружен ниже 0.5kgs 3 оси и 4 оси образования робототехника. Все больше и больше учебных заведений покупают нашу роботизированную систему образования, которая позволяет студентам изучать принципы науки, инженерии, программирования, искусственного интеллекта и автоматизации, а также совершенствовать свои технические навыки, мышление, творчество, командную работу и навыки решения проблем. Они помогают им в продвижении карьерного пути. В настоящее время наша компания производит 3 видов роботизированных манипуляторов для обучения, см. следующие параметры.
Автоматическая система сортировки веса робота
1. Функции и описание:
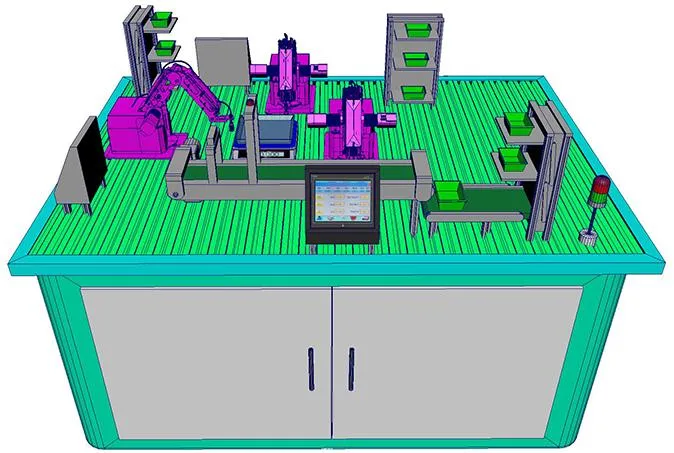
1.1 состав и функции системы
Система подготовки к автоматической сортировке веса робота включает в себя технологию робота, технологию обнаружения датчиков, технологию программирования ПЛК, связь 485modbus и другие технологии.
Система состоит из различных модулей обучающих функций, имеется модуль робота: Состоит из робота, концевого зажима, системы управления роботом и сенсорного экрана обучения.
модуль робота:
состоит из робота, концевого зажима, системы управления роботом и сенсорного экрана обучения.
Модуль ленты транспортера:
Модуль конвейерной ленты состоит из профилей из алюминиевого сплава, а ремень устанавливается для трансмиссии. Пластины листовой металл крепятся с обеих сторон ремня, а конструкция жесткая.
Технические параметры конвейерной ленты:
L 1000 мм*W 280 мм*H 800 мм; максимальная скорость:>3 м/мин
Различные модули концевых зажимов:
взяться рукой, присоской и т.д.
Главный модуль управления ПЛК:
В основном он состоит из контроллера ПЛК, блока управления и т. д. для управления каждым функциональным модулем используется управление ZK3U PLC.
Электронный модуль весов:
(1) точность составляет 0,1 г.
(2) Поддержка обмена данными Modbus-RTU, считываемого веса объекта, состояния баланса.
Модуль датчика:
фотоэлектрические датчики, подсчет заготовок и позиционирование.
Другие:
Главный блок управления, заготовки разных размеров, линии связи в режиме онлайн.
Примечание.
Промышленный робот по умолчанию для рабочих станций — ZK-BOT301Ed, его также можно заменить на аналогичные загружаемых продуктов марки ZEKEEP. Это устройство является производственной линией для учебных и учебных дисплеев и наиболее типичным продуктом для мехатроники. Он разработан для колледжей и университетов, профессиональных колледжей, профессионально-технических учебных заведений и учебных заведений. Подходит для промышленных роботов, мехатроники, автоматизации электроавтоматики и др. Профессиональное обучение и обучение. Он специально разработан для обучения и обучения на основе близости к производственному и производственному участку, что усиливает возможности установки и отладки мехатроники.
3,Вводная информация о системном модуле:
Примечание:изображения и фотографии каждого модуля приведены для справки, форма и размер могут немного отличаться, и приоритет имеет соответствие продукта.
3.1 модуль робота
В модуле используется манипулятор обучения ZK-BOT301Ed, блок управления роботом и сенсорный экран обучения.
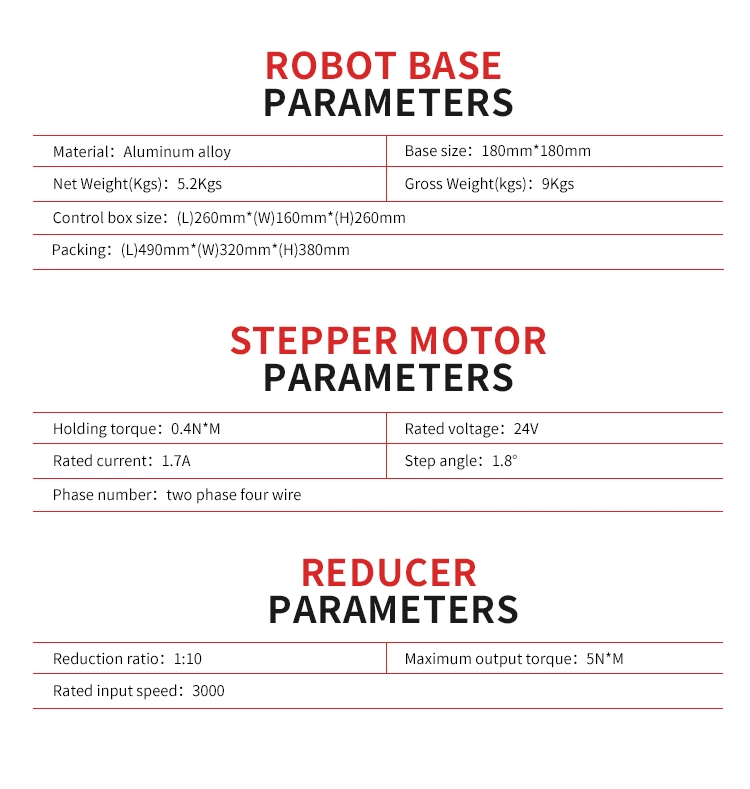
технический параметр:
Размеры (ДxШxВ) 1700X1200X750мм Нижняя форма: Регулируемые ножки и ролики
3.2 модуль промышленного робота
Модуль состоит из обучающим манипулятором ZK-BOT303Ed, основания, захвата, системы управления роботом и пульта обучения.
1.ZK-BOT303Ed*4 комплектов
(1) конструкция манипулятора: Из 6061 анодированных материалов из алюминиевого сплава, оснащенного 3 промышленными двухфазными шаговыми двигателями, 3 1:10 спиральными шестернями, 15 дуговых минут бокового зазора, этот манипулятор представляет собой 42-осевой манипулятор, И откройте протокол управления манипулятором (протокол последовательного порта), пользователи могут разработать манипулятор дважды, простой в использовании, который может использоваться для укладки на паллеты, демонтажа, стомпинга и обработки, и может поддерживать прямую линию от точки к точке, прямую линию к прямой линии и т.д., СДЕЛАТЬ вывод, DI ввод, включая мировые координаты, то есть, он может идти прямо вверх и вниз.
Протокол управления может также поддерживать openMv, промышленные USB-камеры и др. для разработки визуальных сцен, визуального взаимодействия, определения размера и положения объектов и их переноса, а также для подключения внешних устройств, которые могут использоваться для малого промышленного производства. Эта роботизированная консоль также оснащена главным компьютером, который прост в эксплуатации и легко запускается. Он поддерживает три основных пользовательских рецепта и 50-ступенчатые программируемые числа, максимальный диапазон телескопического диаметра составляет 300 мм, а максимальная нагрузка составляет 0,5 КГ. Часто используется в обучении и разработке и применении испытательного стенда.
2) конкретные параметры манипулятора робота
(3) блок управления манипулятором робота *4: Основной блок управления использует 32-битный MCU, а обучающее устройство использует промышленный сенсорный экран; блок управления оснащен 2-позиционными DI, 2-позиционными ПЕРЕКЛЮЧИТЕЛЬНЫМИ значениями DO, которые могут быть подключены к фотоэлектрическим датчикам и промышленным электромагнитным клапанам; Обучение устройство поддерживает интерфейс управления на китайском языке, с отображением координат суставов и координат мира; основной элемент управления поддерживает хранение до 3 групп пользовательских программ, каждая группа пользовательских программ может хранить до 50 шагов, и каждый шаг может быть изменен путем ввода координат; Этот манипулятор робота является настольным трехосным роботом, который поддерживает вторичную разработку пользователей, которая может использоваться для работы с ним, может поддерживать точечную топоюту, точку на линию, линию на линию и т.д., дугоход, выход, DI вход, включая мировые координаты. Заказчики могут самостоятельно разрабатывать 3D-печать, лазерную гравировку и другие периферийные устройства (главный компьютер должен писать самостоятельно). Написание интерактивного программного обеспечения (предоставляется программное обеспечение для записи), визуальное взаимодействие (необходимо самостоятельно разработать главный компьютер), подключение внешнего оборудования и т. д. Загрузить 1000G.
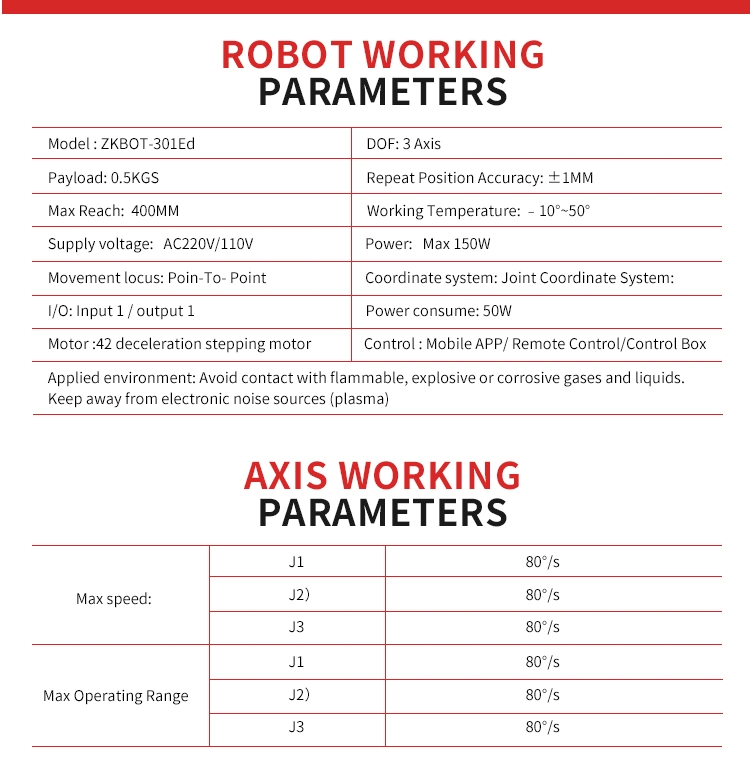
2. Технические параметры обучающего манипулятора робота ZK-BOT303Ed:
Описание системы управления одной роботизированной манипулятором:
1) Система управления
1.1 Системный узел использует новую технологию управления роботом и модулизует управление приводом шаговый двигатель манипулятора робота, системы управления роботом, сбора данных и связи, а также аппаратный интерфейс робота и интегрирует их в блок управления. Система управления роботизированной манипулятора совместима с системой привода.
1.2 независимые исследования и разработка электронного управления, прочные и долговечные.
1.3 Внешний интерфейс включает в себя терминал ввода-вывода и интерфейс внешнего источника питания.
2) пульт обучения A. Портативный пульт обучения B. Размер: 4.3 дюймов
3) Базовая конфигурация системы A. Встроен шкаф управления приводом*1 B. 4.3-дюймовый сенсорный экран*1 C. Электродвигатель: 42 шаговый двигатель с энкодером
3.4 модуль хранения артикуляционного факта задания
4-PCS 4-слойные автоматические подъемные модули, размер 250 мм*200 мм, с использованием алюминиевой рамы, с использованием основного управления для управления количеством слоев логики, включая цепь управляющего двигателя, каждый слой 4-слойного хранилища оснащен инфракрасными датчиками, Это удобно для проверки наличия блока проверки, управления вращением электродвигателя после его установки, автоматического подъема испытательной коробки и ожидания поступления следующей испытательной коробки.
(тестовый блок) (Модуль хранения автоматического подъема)
3.5 Главный модуль управления ПЛК
1)ZK3U ПЛК: 16 канала входа DC24V NPN. 16 канала транзисторного выхода, нагрузка DC24V, максимум 3A (NPN выход 4-канальный 200кГц высокоскоростной импульсный выход. Аналоговое количество (0-10V) 10-канальный AD, 2-канальный DA.communication 1-канальный RS232, 2-канальный RS485.
2) плата печатной платы: 5-х позиционное реле и 6-х полосная оптопара, оснащенная 1-х полосной электронной связью RS485 передаточный модуль, 7-х канальный модуль передачи данных DI, 6-х канальный модуль преобразования выходных данных DO24V;
3)Программное обеспечение: GX WORKS2, GX Developer.
3.6 модуль весов
(1) точность составляет 0,1 г (2) Поддержка связи Modbus-RTU, читаемый вес объекта, состояние баланса
3.7 модуль датчика
(1)10-30В NPN нормально разомкнутый и нормально замкнутый фотоэлектрический переключатель (2), как показано на рисунке:
3.8 визуальный модуль открытого МВ
(1) процессор STM32H74311 ARM Cortex M7, флэш-память объемом 480 МГц 1MBRAM2 МБ, все 1/0-контактные выходы с допустимостью 3,3 в и 5 В. Этот процессор имеет следующий интерфейс 1.
(2) интерфейс USB (12 Мбит/с), подключение к компьютеру. При подключении камеры OpenMV на компьютере отобразится виртуальный COM-порт и USB-накопитель.
(3) слот для карт USD имеет скорость чтения и записи 100 Мбит/с, что позволяет вашим открытым МВ-камерам записывать видео и передавать машинный видеоматериал с карты SD.
(4) Шина SPI со скоростью до 100 Мбит/с, позволяющая просто передавать данные потока изображений на расширительная плата ЖК-дисплея, плату расширения WiFi или другие контроллеры
(5) одна шина 12, ШИНА CAN и 2 две асинхронные последовательные шины (TX/RX) используются для связи с другими контроллерами или датчиками
(6) один 12-битный АЦП и один 12-битный ЦАП
(7) 2/контактов для управления сухим сервоприводом: Все 10 порта могут использоваться для прерываний и ШИМ (на плате имеется 10 //O контактов). (8) один RGBLED (три цвета) два ярких 850 mIRLED (инфракрасных).
(9) 32 МБ внешней памяти SDRAM, тактовая частота 100 МГц, полоса пропускания 400 МБ/с.
(10) Внешний четырехтактный зазор 32 МБ, тактовая частота 4 МГц, режим DDR с битами обеспечивает пропускную способность 100 МБ/с.
3.8 различных модулей концевых инструментов
Робот-захват: С помощью цифрового рулевого механизма LDX-335MG, предназначенного для робота/манипулятора, манипулятора с длительным сроком службы/огнеупорного манипулятора, пневматический захватный инструмент может захватывать систему для хранения заготовки и отправки ее на конвейер. Круглый присоска типа 24 в DC ЭЛЕКТРОМАГНИТ: Круглый присосок типа 24 в DC электромагнит имеет сильную электрическую проводимость, а сильный отсасывание наиболее подходит для отсасывания различных гаек.
3.9 модуль световой сигнализации:
Марка: THND Название: Трехслойный сигнальный фонарь Модель: D50-3-C (бесшумный), D50-3-C-F (со звуковым сигналом) напряжение: DC24V Спецификация: Всегда яркий и блестящий материал: Ламинат PC, база ABS объем: Около 85 дБ тип звука: Непрерывный звук
3.10- цифровой модуль подсчета трубки:
Модель изделия: YL4-2.3JS рабочее напряжение: DC12V с металлической оболочкой Размер: L230MMX H 118.5mX T 35ММ без оболочки Размер: L200MMX H 106mX T23MM опорный датчик: Расстояние обнаружения фотоэлектрического датчика 10cm-30cm, может поддерживать другие датчики типа NPN, такие как зал, металл и т.д. Инструкции по эксплуатации: простой в использовании, комплект прост в использовании, можно подключить к розетке 220в, в основном для расчета поставок заготовок и гаек различных размеров.
3.11 интерфейсный модуль взаимодействия человека и компьютера:
Размер экрана: 7 дюймов Модель TPC7032Kx Серый пластиковый панельный (переменный) Разрешение: 800*480 Размер панели: 226*163 Открытие шкафа: Большое отверстие 215*152 частота системной памяти: 800 МГц Память: 128 МБ Память: 128 МБ интерфейс: 1*RS2322*RS485 на рисунке показан промышленный сенсорный экран:
3.12 запасные части и регулировочные инструменты
Система оснащена полным набором инструментов для настройки и учебных материалов. Список конфигураций приведен ниже (список зависит от фактической модели манипулятора робота): Набор инструментов.
4. Технические параметры:
1. Рабочий источник питания: 220 в±10% 50 ГЦ
2.Рабочая среда: Температура -10С-+40С Относительная влажность<85% (25°C) Высота <4000м
3. Емкость системы: <1000 Вт.
4.Размер: 1700 мм×1200 мм×750 мм 5.вес робота: 50 кг
5. Система завершает проект:
1. Пульт обучения Управление манипулятором робота для возврата к исходной точке.
2. Пульт обучения управляет экспериментом с толчком роботизированной консоли.
3. Эксперимент с многоосным движением манипулятора, управляемого пультом обучения;
4. Пульт управления управляет экспериментом интерполяции многоосевых соединений (синхронизация по 3 осям) манипулятора.
5. Пульт управления управляет манипулятором робота, фотоэлектрическим датчиком и другими экспериментами в целом.
6. Эксперимент по программированию сенсорного экрана.
7. Эксперимент по связи ввода/вывода между ПЛК и роботизированной манипулятором.
8.использование эксперимента с одной роботизированной манипулятором.
9.онлайн-эксперимент с несколькими роботизированными манипуляторов.
10. Открыть размер гайки с визуальным идентификацией мВ.
11. Визуальный рисунок openMv.
12. Откройте визуальное распознавание мВ для поиска цветовых блоков.
13. Визуальное распознавание открытого мВ отслеживание маркера AprilTag.
14. Откройте совмещение визуального шаблона мВ.
15. Откройте многошаблонный визуальный шаблон мВ. Сопоставление.
16. Обнаружение точки открытой функции мВ.
17. Откройте визуальный диапазон мВ.
18. Откройте распознавание визуального кода сканирования мВ.
19. Одновременно откройте соответствие и распознавание цветных шаблонов мВ.
20. Открытый мВ различают разные грани.
21. Показания счетчика цифровой трубки.
22. Реализовать функцию сигнализации.
23. Основная плата управления обменивается данными с дисплеем для реализации интерактивного интерфейса управления дисплеем. 24. Главная панель управления управляет работой модуля хранения заготовок.
25. Эксперимент по автоматической сортировке орехов.
6. Список конфигураций
1. Конфигурация рабочей станции:
|
Название деталей |
Модель |
Номер |
Примечания |
|
манипулятор робота |
ZK-BOT303ED |
4 |
Капитан 340 мм, 42 мотор + секретный редуктор |
|
блок управления |
Блок управления ZK-BOT303ED |
4 |
Содержит MCU, электрическую трубку, плату привода, все типы кнопок |
|
управление с помощью ПЛК Box (блок управления) |
Управление светодиодами ZK3U ПЛК |
1 |
Содержит ПЛК, источник питания. Переходная пластина |
|
Линия связи главного управления ПЛК |
|
1 |
Связь с другими роботизированными манипуляторов |
|
сенсорный экран |
4.3-дюймовый цветной экран |
4 |
Нажмите ввод для изменения параметров |
|
линии связи |
9 контакт 232 коммуникационный провод |
4 |
Связь между манипулятором робота и сенсорным экраном |
|
инфракрасный датчик |
Длина 600 мм* Ширина 100 мм* Высота 100 мм |
2 |
Регулировка высоты, скорость 1-3 м/мин |
|
Модуль сохранения артефактов задания |
CDDD-4ON |
2 |
Высота в соответствии с отладкой тестовой коробки |
|
Модуль сигнальных ламп |
ЭТО |
4 |
Для сигнала тревоги по работе |
|
Цифровой модуль подсчета туб |
YL4-2.3JS |
3 |
Он используется для расчета общего количества материала и поставку орехов |
|
электронная шкала |
|
1 |
485 связь (протокол modbus) |
|
Крепления для переоборудования и другие приспособления |
|
4 |
Захватите материалы |
|
Визуальный модуль |
OpenMV |
1 |
Гайка сортировки |
|
Орехи, экспериментальные коробки |
|
1 |
Размер гайки |
|
шкаф для инструментов |
|
1 |
инструмент для замены |
ЧАСТО ЗАДАВАЕМЫЕ ВОПРОСЫ
В1: Можно ли использовать роботизированные манипуляторов в промышленности? Какие функции могут быть?
A1: Максимальная полезная нагрузка 0,5 кг , может использоваться в легкой промышленной производственной линии, может использоваться как обучение, сортировка, захват к объектам .
В2: Может ли он использоваться в качестве манипулятора робота для обучения или обучения? Может ли поддерживать источник пера?
О2: Да, этот робот может пройти базовое вводное обучение и обучение. Наши инженеры имеют большой опыт работы в крупномасштабных проектах по применению робототехники. На основе этого опыта мы разработали недорогой робот, подходящий для простой эксплуатации и обучения.
Только база поддерживает API, его можно разработать дважды (координаты суставов и координаты мира), обучить программированию подвесного пульта, управлять многороботным контекстом. Программное обеспечение управления предоставляет демонстрационный режим для главного компьютера labview
В3: Люди, которые никогда не учились программированию, могут ли вы управлять этим роботом?
О3: Пульт дистанционного управления с сенсорным управлением прост в использовании
В4: Можно ли установить рабочий цикл и координаты? Скорость регулируется?
A4: Поддержка цикла узла движения в течение 150 шагов; можно использовать пульт обучения для установки координат узла движения, а скорость движения узла и общая скорость можно регулировать в любое время.
В5: Можете ли вы предоставить технический документ?
О5:Да, мы это делаем. И это английский .
В6 какой язык поддерживает Ваша система?
A6 интерфейс пользователя на английском языке .
В7 как устранить неполадки при использовании устройства?
О7 мы предоставляем бесплатную онлайн-поддержку.
В8 сколько времени у вас время выполнения заказа?
О8 обычно, это около 15 рабочих дней . если у нас есть роботы на складе , мы можем немедленно отправить.
В9 имеется ли функция экономии при отключении питания?
О9 Да
В10: Что включает система распознавания веса и что она делает?
A10: Система определения веса включает в себя следующие элементы
4 комплекта роботизированных манипуляторов ZKBOT-303Ed
X1set электронный весы
Комплект X2, электронная конвейерная лента 1M
X1 установите основной блок управления (это может привести к контексту другого блока управления)
ФОТОЭЛЕКТРИЧЕСКИЙ датчик С НАБОРОМ ИЗ 1 ШТ.
X1 установите камеру Visual
В11: В чем заключается необходимость в работе с несколькими машинами в режиме онлайн?
О11: Необходимо сотрудничать с другим оборудованием на производственной линии для инфракрасного обнаружения и захвата объектов, электронных весов для определения качества сортировки, инфракрасной загрузки и разгрузки, пригодных для промышленного многомашинного сотрудничества, обучения общеобразовательному производству и т.д.
Наше образование роботизированная рука
Он загружен ниже 0.5kgs 3 оси и 4 оси образования робототехника. Все больше и больше учебных заведений покупают нашу роботизированную систему образования, которая позволяет студентам изучать принципы науки, инженерии, программирования, искусственного интеллекта и автоматизации, а также совершенствовать свои технические навыки, мышление, творчество, командную работу и навыки решения проблем. Они помогают им в продвижении карьерного пути. В настоящее время наша компания производит 3 видов роботизированных манипуляторов для обучения, см. следующие параметры.



 Complaint
Complaint