Description
1. متطلبات تصميم تجميع خلية البطارية تلقائيًا
1.1، المعلمة الفنية التجميع التلقائي لخلية البطارية:
(1)سعة الجهاز: ≥10 جزء في المليون؛
(2)المعدل الممتاز النهائي هو ≥99.8% (المنتجات التالفة
فقط التي تسببها المعدة)؛ (3)معدل عطل المعدة 2%؛
(4)متوافق مع مواصفات وحدة قياس متنوعة، تغيير سريع. استقرار قدرة خرج الليزر (التقلب) ≤±1%، يمكن عرض وضبط الطول البؤري لجهاز الجلفانومتر رقمياً، والنطاق هو -5.0~+5.0 مم، ودقة الضبط ≤0.5 مم؛(5)يتم تحرير مسار اللحام بواسطة برنامج اللحام، ويتم تشغيل عملية اللحام تلقائياً، ويمكن تعديل المعلمات، ويمكن تعيين مرجع التشغيل والتعديل
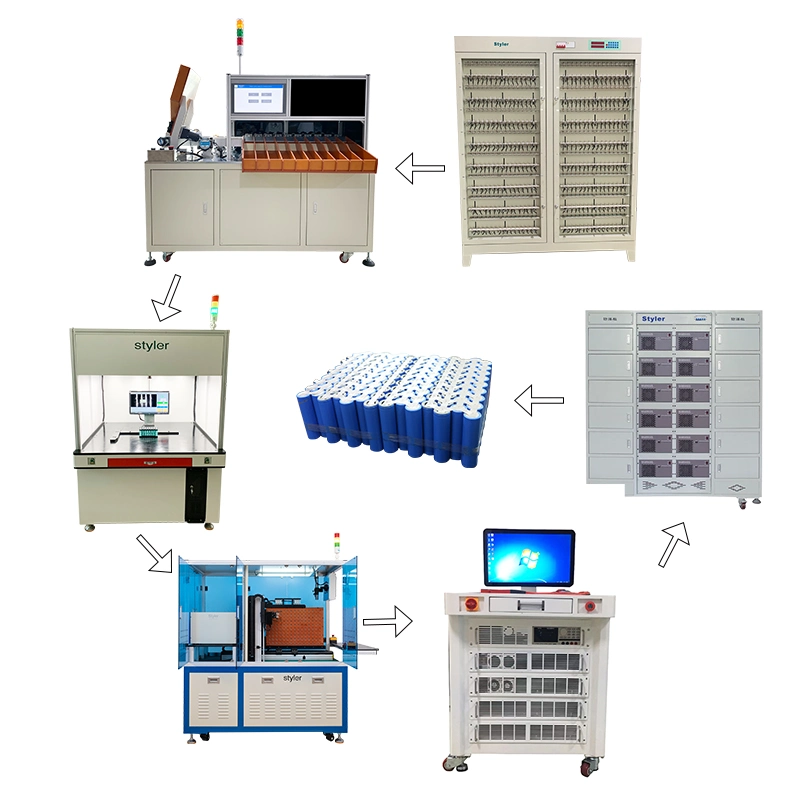
1.2،مخطط التدفق:
تدفق مؤقت للعملية، وفقًا للمتطلبات الفعلية
2.
تخطيط البرنامج 2.1 عمليات ترقيم البرامج:
2.2 حجم التخطيط:
حجم التخطيط الخلفي (الطول*العرض*الارتفاع):19500 مم*9000مم*3200 مم
حجم التخطيط الأمامي (الطول*العرض*الارتفاع):13000مم*6000 مم*2300مم
3) مقدمة وحدة الوظيفة
3.1 محطة التغرية
3.1.1 وصف المعدات:
مخطط الهيكل الداخلي لتنظيف الخلية وتغربها
مقدمة عن محطة التنظيف والتغليف: 1. بعد وضع العامل خلية البطارية على سير ناقل التغذية، يمكن أن تكمل المعدة عملية التنظيف والتغليق تلقائيًا؛ 2. نبذات المعدات: 12 PPM؛
3.1.2 معلمات المعدات:
اتصل بنا للحصول على مزيد من المعلومات حول خط التجميع الأوتوماتيكي.
3.2 تجميع الجداول الدوارة
3.2.1 وصف تدفق الإجراءات:
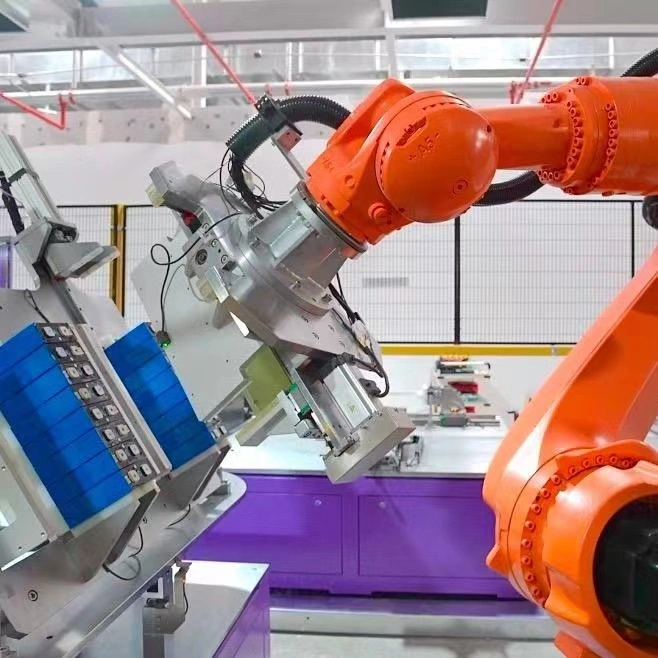
1) عملية العمل: يقوم الروبوت المكدس بفك تحميل المواد من خط ناقلة معدات التغرية وإلغاء تحميلها، كما يقوم بعمليات التجميع بالتسلسل المتوازي التسلسلي لوصفات الوحدة. يمكن لطريقة التكديس هذه أن تستوعب بمرونة تركيبات الوحدات مع وصفات مختلفة بتسلسلات متوازية. ويتعاقب تسلسل التكديس من الأسفل إلى الأعلى، وتتناوب الخلايا ولوحات العزل، من الخلية الأولى إلى لوحة العزل الأولى، ثم إلى الخلية الأولى في اليد الأخيرة. أثناء عملية التجميع، يتم الضغط مسبقًا على آلية الضغط والضغط لأسفل وتثبيتها في الوقت نفسه.
2) يتم التحكم في الحامل بواسطة الروبوت للتحكم في آلية الإمساك، ويتم تصميم المقبض مع وجود خلايا الحث الكهروضوئي في مكانها. تعتمد منصة تجميع الوحدات تصميمًا ثنائي المحطات ثابتة الانحدار. تحتوي كل محطة على قامطات مزدوجة، والتي يمكنها وضع خليتين في نفس الوقت. عندما تكون المحطة A في تكدس، تقوم المحطة B بشكل متزامن بتنفيذ العمل المتحرك قبل الطرد، وتتناوب المحطة المزدوجة، لتحسين كفاءة التجميع والتحرك.
3-2-2 توضيح استراتيجية التغيير:
1) تغيير حامل الخلية: اختيار أسطوانة تثبيت ذات شوط طويل، والتي يمكن أن تتوافق تلقائيًا مع أنواع مختلفة من الخلايا عند التغيير؛
2. تغيير حامل لوح العزل: يتم تركيب مجموعة أداة شفط الفراغ على هيكل الألومنيوم، ويمكن ضبط المسافة بين أكواب الشفط يدويًا وفقًا لعرض لوحة العزل عند تغيير الطراز.
3) البرنامج الكهربائي: وفقًا لتسلسل التجميع المتوازي التسلسلي للوحدات المتوافقة، يقوم الروبوت بعملية التجميع وفقًا لبرنامج تسلسل التجميع الآلي المعين مسبقًا. قبل تغيير النموذج، يتم نقل برنامج التجميع للمنتج الذي يغير الطراز.
3-2-3 توضيح استراتيجية التغيير:
3.3 مقدمة وحدة الوظيفة
3-3-1 محطة الطرد: عملية وحدة الصف المزدوج
1) ينقل الروبوت المناولة المكدسات 1 و2 على التوالي من القرص الدوار إلى طاولة تحريك البثق، وتنزلق الطاولة المنزلقة إلى موضع الطرد اليدوي؛ 2. قم بتثبيت لوحة القسم الأوسط يدويًا (التنظيف اليدوي





 Complaint
Complaint