




 Complaint
Complaint

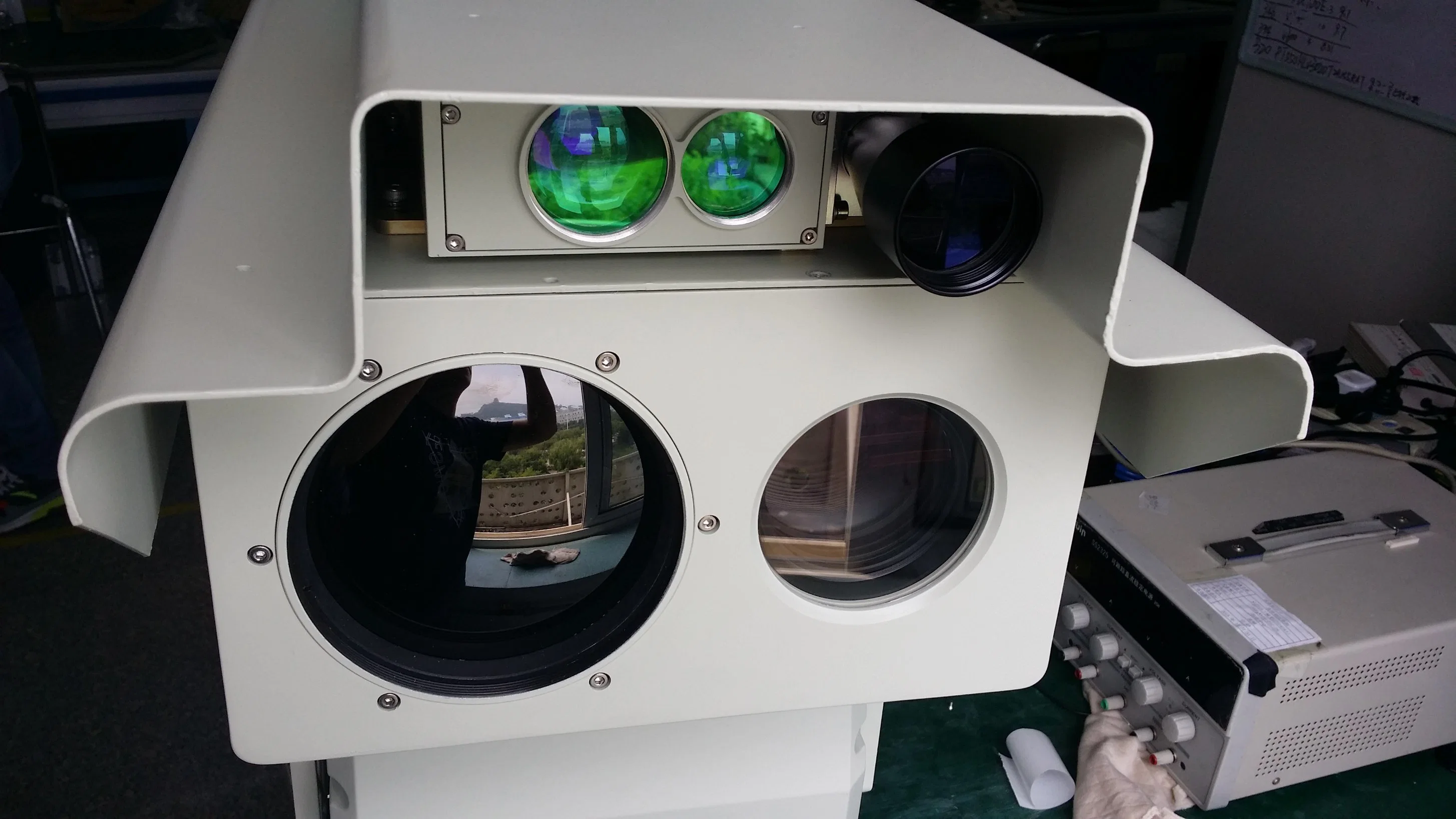
Características del producto
| Número de modelo | SHR-WHLV4020HTIR205R-LRF10 | |||||||
| Distancia de monitorización (m) | Día | 8~10km | ||||||
| Láser | 4~5km | |||||||
| Cámara térmica | Detección | Humano | Vehículo | |||||
| 5600m | 16000m | |||||||
| Reconocimiento | Humano | Vehículo | ||||||
| 1400m | 4000m | |||||||
| Identificación | Humano | Vehículo | ||||||
| 700m | 2000m | |||||||
| Cámara térmica | Distancia focal | 40~200mm | ||||||
| Control de lente | Zoom eléctrico, enfoque eléctrico, enfoque automático | |||||||
| Tipo de detector | Matriz de plano focal de microbolómetro no refrigerado (Vox) | |||||||
| Píxel efectivo | 640×512 y 384×288 | |||||||
| Rango de espectro | 8~14μm | |||||||
| RED | ≤50mK@F1,0,300K | |||||||
| Frecuencia de trama | 25Hz | |||||||
| Corrección de no uniformidad | Auto/ manual/ corrección de fondo | |||||||
| Proceso de imagen | DDE, pseudo color | |||||||
| Cámara de luz visible | Distancia focal | 16,7~1000mm | ||||||
| CDV | 0,45°~25° | |||||||
| Iris automático | Unidad de CC | |||||||
| Niebla penetrante | Apoyo | |||||||
| Enfoque automático | Apoyo | |||||||
| Limpiaparabrisas | Apoyo | |||||||
| Sensor | 1/1,8''CMOS de exploración progresiva | |||||||
| Formato de código | H.264/MJPEG/MPEG4 | |||||||
| Resolución de vídeo | 1080p, apoyando tres flujos | |||||||
| Protocolo de red | TCP/IP/RTP/RTSP/HTTP/DNS/DDNS/DHCP/FTP/NTP/PPPOE/SMTP/UPNP | |||||||
| Buscador de alcance láser | Rango máx | 10km (en el modo de latitudes medias atmósfera,T=20ºC, humedad relativa 70%,1 presión atmosférica estándar, visibilidad horizontal>23,5km) | ||||||
| Rango mín | ≤50m | |||||||
| Capacidad de alcance (3×3) | >=6000m | |||||||
| Longitud de onda | 1570nm | |||||||
| Divergencia del haz | 0,6~0,8mrad | |||||||
| Precisión | ±1m | |||||||
| Frecuencia de repetición | 1Hz | |||||||
| GPS | Antena | Integrado | ||||||
| sensibilidad | -165 dBm | |||||||
| Precisión | 5 m | |||||||
| Velocidad de ubicación | En condiciones de cielo abierto;arranque en caliente 1 s;arranque en caliente 35 s;arranque en frío 38 s; recaptura <1 s. | |||||||
| Altura | < 18.000 m | |||||||
| Velocidad | < 515 m/s. | |||||||
| Aceleración | < 4 g | |||||||
| Pantilt | Carga | 50kg (montado en la parte superior) | ||||||
| Ángulo de giro | 360°, rotación continua | |||||||
| Ángulo de inclinación | -45°~+45° | |||||||
| Velocidad | Panorámica: 0,01°~ 12°/s inclinación: 0,01°~8°/s. | |||||||
| Preajuste | 255 | |||||||
| Precisión preestablecida | ±0,1° | |||||||
| Crucero automático | 2 camino, 64presets cada camino | |||||||
| Exploración de línea automática | 1 camino | |||||||
| Protocolo de comunicación | Pelco-D,Pelco-P opcional | |||||||
| Velocidad de bits | 2400/4800/9600/19200 bps opcional | |||||||
| Antirelámpago | Fuente de alimentación 4000V, señal de vídeo 2000V | |||||||














