
 Complaint
Complaint

El tema | Valor |
Nombre de marca | HCNC/RSS |
El núMero de modelo | Plataforma de formacióN JR603 |
El conjunto eléCtrico del robot y depuracióN de la plataforma de formacióN | 1350*650*1600 mm |
Conjunto mecáNico del robot y depuracióN de la plataforma de formacióN | 1600*880*1600 mm |
El consumo de aire | 65L/min. |
El peso | 450kg. |
La especificacióN | Cant. | Comentarios | |
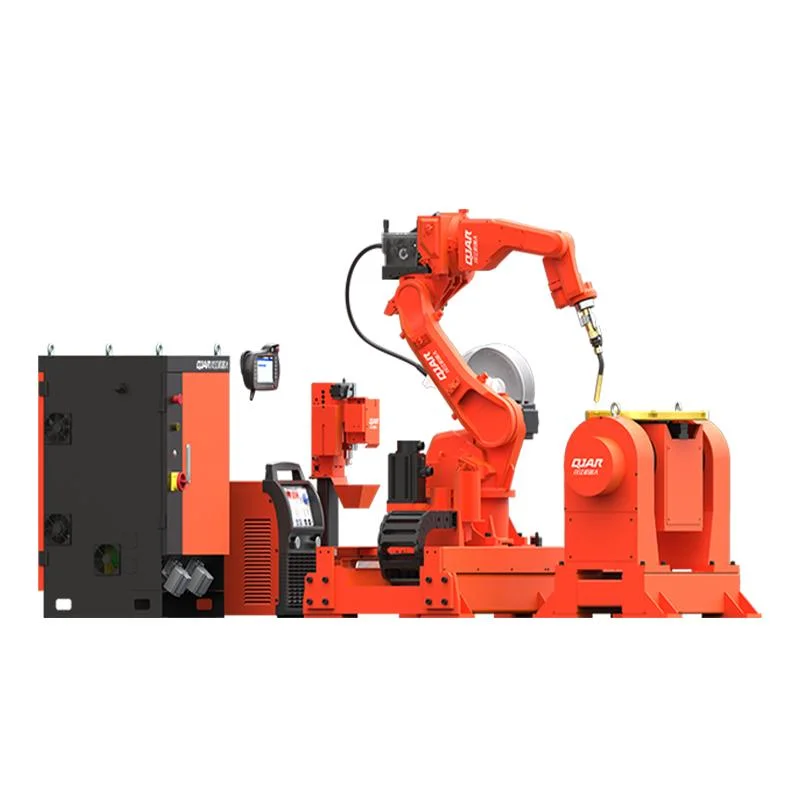
1 | Robot de seis ejes | 1 | Eje 6 (estáNdar) |
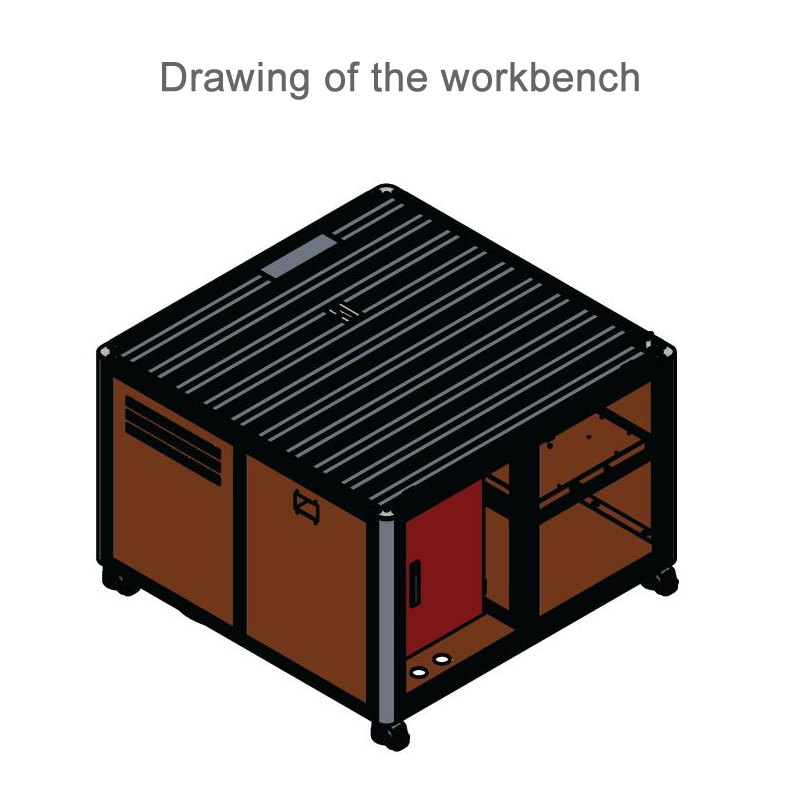
2 | Conjunto mecáNico del robot y depuracióN de la plataforma de formacióN | 1 | Standard |
3 | El conjunto eléCtrico del robot y depuracióN de la plataforma de formacióN | 1 | Standard |
4 | Herramientas del cuerpo del robot | 1 | Standard |
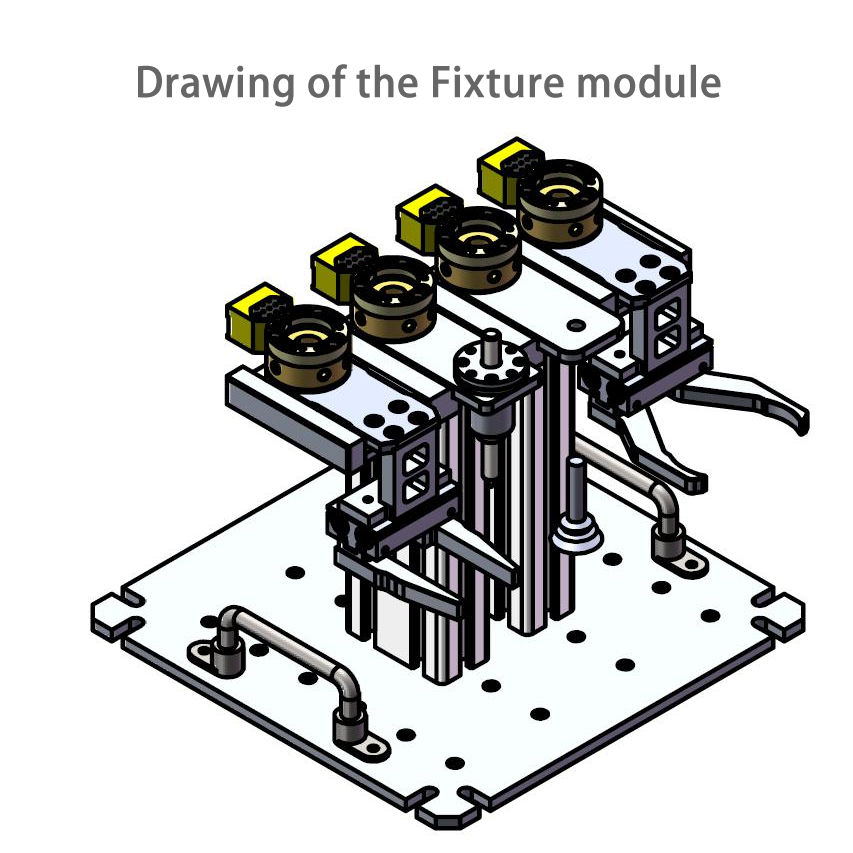
5 | Soporte multi-funcional del robot | 1 | DescripcióN del cilindro de pluma, la sujecióN, ventosa (estáNdar) |
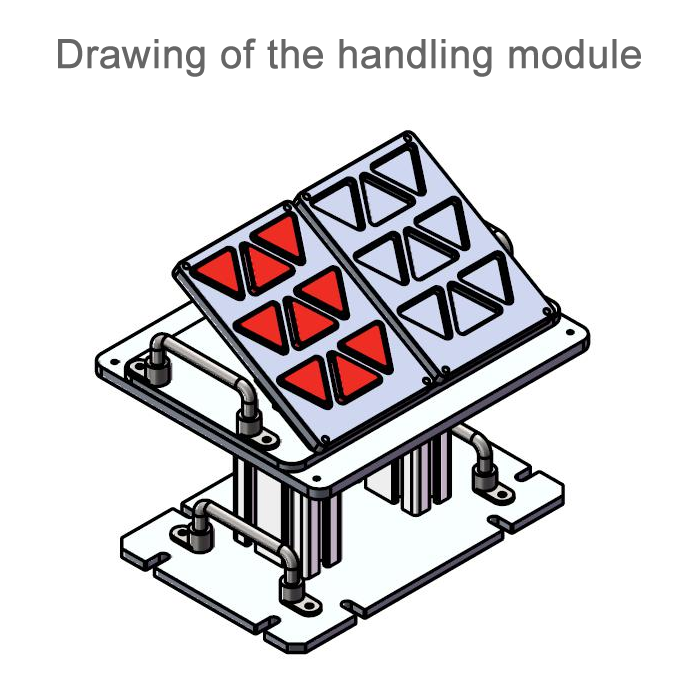
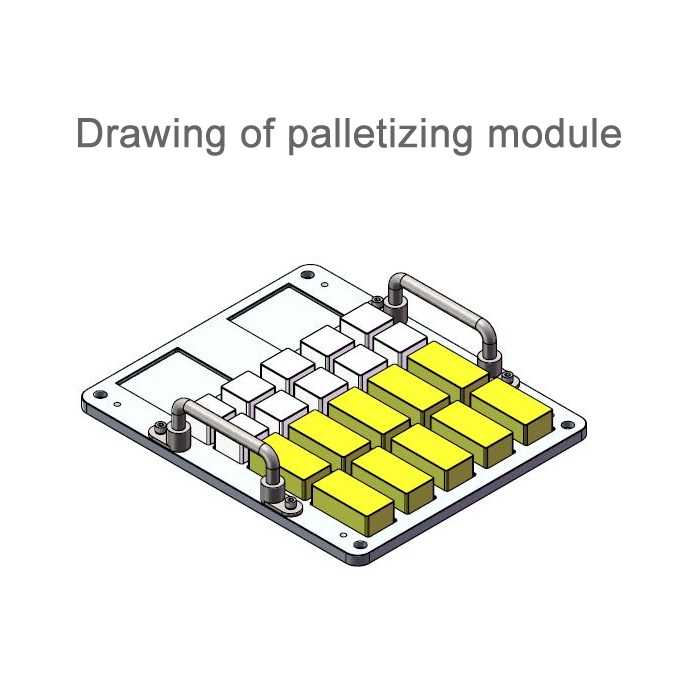
6 | Componente de objeto de formacióN | 1 | DescripcióN de la pista, la manipulacióN y el móDulo de apilamiento (estáNdar) |
7 | Desmontaje de las herramientas mecáNicas y eléCtricas | 1 | Standard |
8 | La bomba de aire | 1 | Opcional |
9 | El equipo | 1 | Standard |