Description
descripción de producto
BRAZO ROBÓTICO DE ESCRITORIO EDUCATIVO
AI sistema inteligente de ordenación visual de enseñanza de la solusión
NO DE ARTÍCULO . ZKBOT-301ED
Nuestra educación brazo robótico
Se carga por debajo de 0,5kgs de 3 ejes y 4 ejes de educación robótica brazo . Cada vez más instituciones educativas están comprando nuestro brazo robótico educativo, que permite a los estudiantes aprender los principios de la ciencia, la ingeniería, la programación, la inteligencia artificial y la automatización, y mejorar sus habilidades técnicas, el pensamiento, la creatividad, el trabajo en equipo y la resolución de problemas. Ellos les ayudan a avanzar en su futuro camino de carrera.en la actualidad, nuestra empresa produce 3 tipos de armas robóticas para la enseñanza, por favor, consulte los siguientes parámetros.
Sistema de formación de clasificación automática de peso del robot
1. Función y descripción:
1,1 composición y función del sistema
El sistema de formación de clasificación automática de peso de robot incluye tecnología de robot, tecnología de detección de sensores, tecnología de programa PLC, comunicación 485modbus y otras tecnologías.
El sistema consta de una combinación de varios módulos de funciones de formación, hay un módulo de robot: Consta de robot, pinza de cierre, sistema de control de robot y pantalla táctil de aprendizaje.
módulo robot:
consta de robot, pinza de cierre, sistema de control de robot y pantalla táctil de aprendizaje.
Módulo de cinta transportadora:
El módulo de la cinta transportadora está construido con perfiles de aleación de aluminio y la cinta está instalada para la transmisión. Las placas lámina metálica están fijadas a ambos lados de la banda y la estructura es firme.
Parámetros técnicos de la cinta transportadora:
L 1000mm*W 280mm*H 800mm; velocidad máxima:>3m/min
Una variedad de módulos de abrazadera de extremo:
agarrado a mano, ventosa, etc.
Módulo de control principal del PLC:
Se compone principalmente de un controlador PLC, una caja de control, etc. el PLC de control ZK3U se utiliza para controlar cada módulo funcional.
Módulo de báscula electrónico:
(1) la precisión es 0,1g
(2) Soporte de comunicación modbus-RTU, peso de objeto legible, estado de balance.
Módulo del sensor:
sensores fotoeléctricos, recuento de piezas y posicionamiento.
Otros:
Caja de control principal, piezas de diferentes tamaños, líneas de comunicación en línea.
Nota:
El robot industrial por defecto para aplicaciones de estaciones de trabajo es ZK-BOT301Ed, y también puede ser sustituido por productos de carga similares de la Marca ZEKEEP. Este dispositivo es una línea de producción de pantallas de enseñanza y formación y el producto mecatrónico más típico. Se ha desarrollado para colegios y universidades, colegios profesionales e instituciones de educación y formación profesional. Es adecuado para robots industriales, mecatrónica, automatización eléctrica, etc. Enseñanza y formación profesional. Está especialmente diseñado para la enseñanza y la formación sobre la base de estar cerca de la planta de producción y fabricación industrial, lo que refuerza las capacidades de instalación y depuración de la mecatrónica.
3,Introducción al módulo del sistema:
Nota:las imágenes y fotos de cada módulo son de referencia, la forma y el tamaño pueden ser ligeramente diferentes, y prevalecerá la coincidencia del producto.
3,1 módulo del robot
El módulo adopta el manipulador de enseñanza ZK-BOT301Ed, la caja de control del robot y la pantalla táctil de enseñanza.
parámetro técnico:
Dimensiones (L x An x al) 1700X1200X750mm forma inferior: Patas y rodillos ajustables
3,2 módulo de robot industrial
El módulo está compuesto por el manipulador de enseñanza ZK-BOT303Ed, la base, la herramienta de agarre final, el sistema de control del robot y la unidad de programación.
1.ZK-BOT303Ed*4 juegos
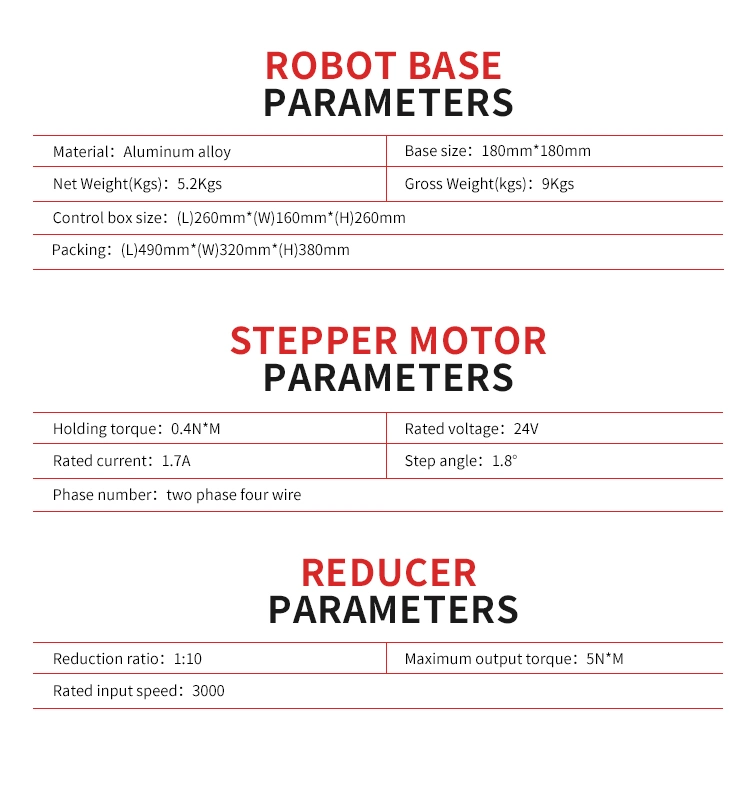
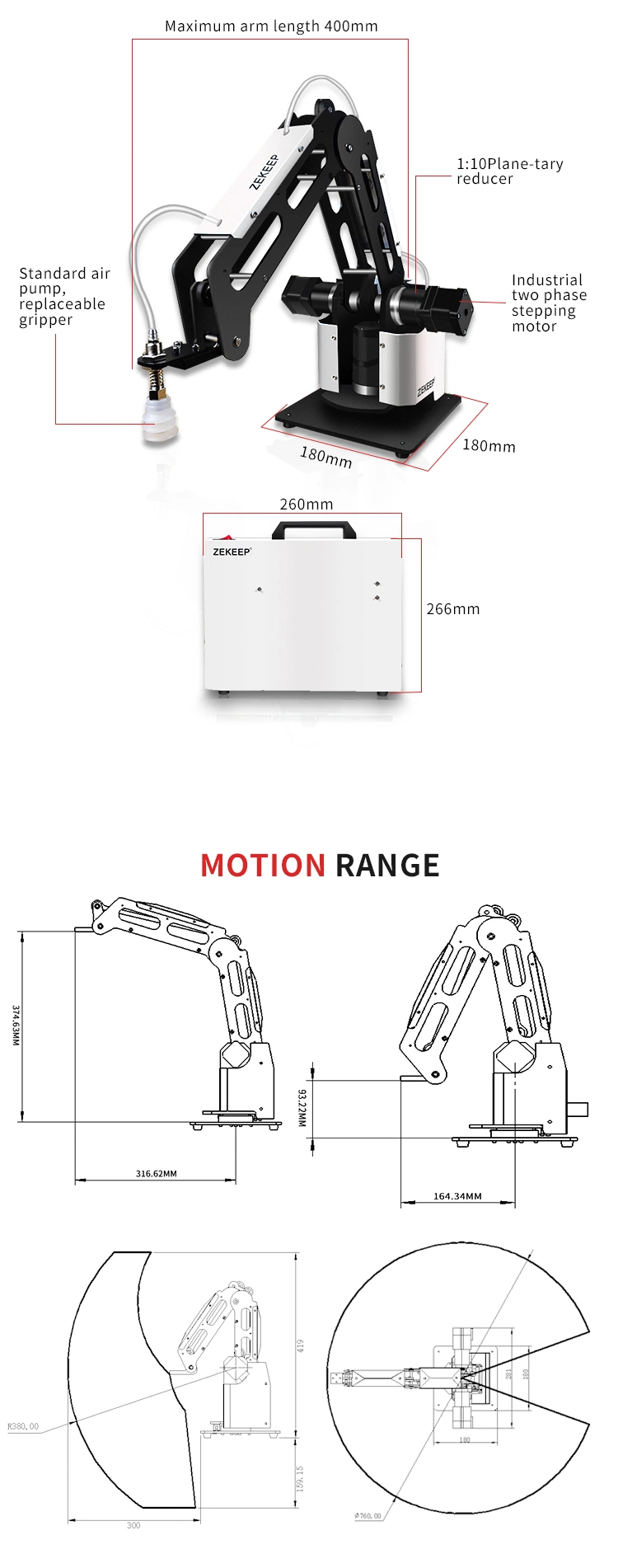
(1) estructura del manipulador: Fabricado con material anodizado de aleación de aluminio de 6061, equipado con 3 motores paso a paso bifásicos industriales, reductores de engranajes helicoidales de 3 1:10, 15 minutos de arco de retroceso, este manipulador es un manipulador de tres ejes modelo de aprendizaje de motor paso a paso de 42, Y abrir el protocolo de control del manipulador (protocolo de puerto serie), los usuarios pueden desarrollar el manipulador dos veces, fácil de usar, que se puede utilizar para paletizar, desmontar, pisotear y manipular, y puede soportar punto a punto, punto a punto línea recta, línea recta a línea recta, etc., SALIDA DO, entrada DI, incluidas las coordenadas del mundo, es decir, puede ir directamente arriba y abajo.
El protocolo de control también puede soportar openMv, cámaras industriales USB, etc. para desarrollar escenas visuales, interacción visual, identificar el tamaño y la posición de los objetos y transportarlos, y conectar dispositivos externos, que se pueden utilizar para la producción industrial pequeña. Este brazo robótico también está equipado con un ordenador host operativo, que es fácil de manejar y rápido de comenzar. Admite tres recetas de usuario principales y números programables de 50 pasos, el rango de diámetro telescópico máximo es 300mm y la carga máxima ES 0,5kg. Se utiliza a menudo en la enseñanza y el desarrollo de banco de pruebas y la aplicación.
2)los parámetros específicos del brazo del robot
(3) Caja de control del brazo del robot *4: El control principal adopta MCU de 32 bits, y el dispositivo de enseñanza adopta pantalla táctil industrial; la caja de control está equipada con UN VALOR de interruptor DE DO DE 2 vías DI de 2 vías, que puede conectarse a sensores fotoeléctricos y válvulas de solenoide industriales; Enseñar el dispositivo soporta la interfaz de operación China, con coordenadas conjuntas y visualización de coordenadas mundiales; el control principal soporta el almacenamiento de hasta 3 grupos de programas de usuario, cada grupo de programas de usuario puede almacenar hasta 50 pasos, y cada paso puede ser modificado introduciendo coordenadas; Este brazo robot es un brazo robótico de tres ejes de escritorio que soporta el desarrollo secundario de usuarios, que puede ser utilizado para la manipulación, puede soportar punto-topoint, punto-a-línea, línea-a-línea, etc., arco caminando, SALIDA DO, entrada DI, incluyendo coordenadas del mundo. Los clientes pueden desarrollar 3D impresión, grabado láser y otros periféricos por sí mismos (el ordenador host necesita escribir por sí mismos). Software interactivo de escritura (se proporciona software de escritura), interacción visual (necesidad de desarrollar el ordenador host por sí mismo), y conexión de equipo externo, etc. carga 1000G.
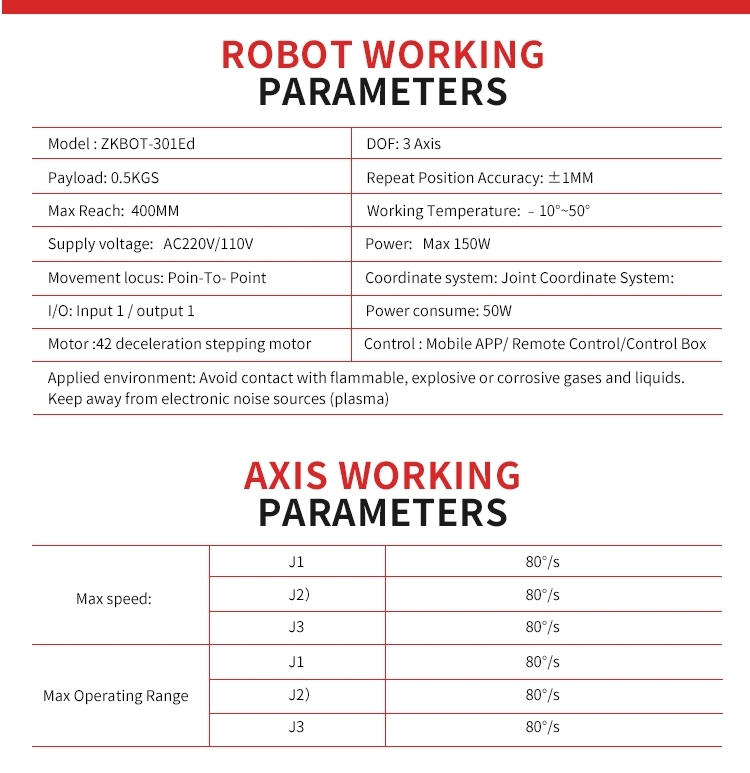
2. Parámetros técnicos del brazo del robot de enseñanza ZK-BOT303Ed:
Descripción de un único sistema de control de brazo robótico:
1) sistema de control
1,1 el sistema anfitrión adopta la nueva tecnología actual de control de robots, y modula el control de accionamiento motor de pasos del brazo del robot, el sistema de control del robot, la adquisición de datos y la comunicación, y la interfaz de hardware específica del robot, y los integra en una caja de control. El sistema de control del brazo robótico es compatible con el sistema de accionamiento.
1,2 Investigación y desarrollo independientes del control electrónico, fuerte y duradero.
1,3 la interfaz externa incluye un terminal de E/S y una interfaz de fuente de alimentación externa.
2) Unidad de enseñanza A. Unidad de enseñanza portátil B. Tamaño: Color 4,3 pulgadas
3) Configuración básica del sistema A. Armario integrado de control de accionamiento*1 B. pantalla táctil de 4,3 pulgadas*1 C. Motor: Motor de pasos 42 con codificador
3,4 módulo de almacenamiento de artefactos de trabajo
4-PCs 4-layer Well-type módulos de almacenamiento de elevación automática, el tamaño es 250mm*200mm, utilizando el marco de aleación de aluminio, utilizando el control principal para controlar el número de capas lógica, incluyendo el circuito del motor de control, cada capa del almacenamiento de 4 capas está equipada con sensores infrarrojos, Lo que resulta conveniente para probar si la caja de prueba está en su lugar, controlar el motor para que gire después de que esté en su lugar, automáticamente subir una altura de la caja de prueba, y esperar a la llegada de la siguiente caja de prueba.
(caja de prueba) (Módulo de almacenamiento de elevación automático)
3,5 módulo de control principal del PLC
1)ZK3U PLC: 16 canales de DC24V entradas NPN. 16 canales de salida de transistor, carga DC24V, máximo 3A (salida NPN 4 canales 200kHz salida de pulsos de alta velocidad. La cantidad analógica (0-10V) es 2 canales AD, DA.communication canales 1 es RS232 canales 2, RS485 canales 10.
2) placa PCB en línea: Aislamiento de optoacoplador y relé de 5 vías 6, equipado con módulo de transferencia RS485 de comunicación a escala electrónica de 1 vías, módulo de transferencia de comunicación DE entrada DI de 7 vías, módulo de conversión de salida DO24V de 6 vías;
3)Software del programa: GX WORKS2, GX Developer.
Módulo de escala 3,6
(1) la precisión es 0,1g (2) Soporte de comunicación modbus-RTU, peso de objeto legible, estado de equilibrio
3,7 módulo de sensor
(1)10-30V interruptor fotoeléctrico NPN normalmente abierto y normalmente cerrado (2)como se muestra en la figura:
3,8 módulo visual openMV
(1) procesador STM32H74311 ARM Cortex M7, 480MHz1MBRAM2 MB flash, todos los 1/0 pines tienen una tolerancia de 3,3V y 5V. Este procesador tiene la siguiente interfaz 1.
(2) interfaz USB de velocidad completa (12Mbs), conecte al ordenador. Cuando la cámara OpenMV esté conectada, aparecerá un puerto COM virtual y un "dispositivo USB" en el ordenador.
(3) la ranura de la tarjeta USD tiene 100Mbs de lectura y escritura, lo que permite que sus cámaras MV abiertas graben vídeo, y transferir material de visión de la máquina de la tarjeta SD extraída.
(4) un bus SPI de hasta 100Mbs velocidades, lo que le permite transferir simplemente los datos de flujo de imágenes a la placa de expansión LCD, la placa de expansión WiFi u otros controladores
(5) se utilizan un bus 12, bus CAN y 2 dos buses serie asíncronos (TX/RX) para conectar otros controladores o sensores
(6) un ADC de 12 bits y un DAC de 12 bits
(7) 2/pines para control de servo seco: Los 10 puertos pueden usarse para interrupciones y PWM (hay 10 / / / o pines en la placa). (8) un RGBLED (tres colores) dos brillantes 850mIRLED (infrarrojos).
(9) 100MHz SDRAM externa de 32 bits, reloj de 400MB, ancho de banda de 32MB/s.
(10) 32MB cuadrspíflash externo, 100MHz reloj, 100MB-bitDDR modo alcanza 4/s ancho de banda.
3,8 módulos de herramientas de varios extremos
Herramienta de agarre de extremo de robot: Utilizando el mecanismo de dirección digital de Marca LDX-335MG, dedicado al robot/manipulador, manipulador resistente a quemaduras/larga vida útil, la herramienta de agarre neumático puede agarrar el sistema para almacenar la pieza de trabajo y enviarla a la cinta transportadora. Herramienta electroimán tipo 24V DC de ventosa circular: La herramienta electroimán tipo 24V DC de ventosa circular tiene una fuerte conductividad eléctrica, y la succión fuerte es más adecuada para chupar diferentes tuercas.
3,9 módulo de luces de alarma:
Marca: THND Nombre: Luz de señal de tres capas Modelo: D50-3-C (silencioso), D50-3-C-F (con zumbador) voltaje: DC24V Especificaciones: Siempre brillante y brillante material: Lámpara PC, base ABS volumen: Alrededor de 85dB tipo de sonido: Sonido continuo
3,10- módulo de recuento de tubos digital:
Modelo de producto: YL4-2,3JS tensión de trabajo: DC12V con carcasa metálica tamaño: L230MMX H 118,5mmX T 35mm sin carcasa tamaño: L200MMX H 106mmX T23MM sensor de soporte: Distancia de detección de sensor fotoeléctrico 10cm-30cm,puede soportar otros sensores tipo NPN, como Hall, metal, etc. instrucciones de uso: fácil de usar, todo el juego es fácil de usar, enchufable en la toma 220v se puede utilizar la alimentación de red, principalmente para calcular los envíos de piezas y tuercas de varios tamaños.
3,11 módulo de interfaz de interacción hombre-ordenador:
Tamaño de pantalla: 7 pulgadas Modelo TPC7032Kx Panel plástico gris (variable) resolución: 800*480 Tamaño del panel: 226*163 abertura del armario: Abertura grande 215*152 frecuencia principal: 800MHz memoria: 128M almacenamiento: 128M interfaz serie: 1*RS2322*RS485 la pantalla táctil industrial se muestra en la figura:
3,12 piezas de repuesto y herramientas de ajuste
El sistema está equipado con herramientas de configuración completas y consumibles de formación. La lista de configuración específica es la siguiente (la lista está sujeta al modelo real del brazo del robot): Un conjunto de herramientas.
4. Parámetros técnicos:
1.Alimentación de trabajo: ac220v±10% 50Hz
2.entorno de trabajo: Temperatura -10ºC-+40ºC humedad relativa<85%(25ºC) Altitud<4000m
3.capacidad del sistema: <1000W
4.Talla: 1700mm×1200mm×750mm 5.Peso del robot: 50kg
5.el sistema completa el proyecto:
1. Unidad de programación Controle el brazo del robot para volver al origen.
2. La unidad de programación controla el experimento de jog del brazo robótico.
3. El experimento de movimiento multieje del manipulador controlado por la unidad de programación;
4.el control colgante de enseñanza controla el experimento de interpolación de junta multieje (sincronización de 3 ejes) del manipulador.
5.el control colgante de enseñanza controla el brazo del robot, el sensor fotoeléctrico y otros experimentos de casos generales.
6. Experimento de programación de pantalla táctil.
7. Experimento de comunicación de E/S entre PLC y brazo robótico.
8.experimento de manejo de un solo brazo robótico.
9.experimento en línea de múltiples brazos robóticos.
10. Tamaño de tuerca de identidad visual MV abierta.
11. Dibujo visual openMv.
12. Abra el reconocimiento visual MV para buscar bloques de color.
13. Reconocimiento visual de MV abierto AprilTag seguimiento de marcadores.
14. Abra la comparación de plantillas visuales MV.
15. Abrir plantilla múltiple visual MV. Coincidencia.
16. Detección de puntos de característica visual MV abierta.
17. Rango visual de MV abierto.
18. Reconocimiento de código de exploración visual MV abierto.
19. Abra la correspondencia y el reconocimiento de la plantilla de color MV al mismo tiempo.
20. Abrir MV distinguir diferentes caras.
21. Lectura digital del recuento de tubos.
22. Implementar la función de alarma.
23. La placa de control principal se comunica con la pantalla para realizar la pantalla de control de interfaz interactiva. 24. La placa de control principal controla el funcionamiento del módulo de almacenamiento de la pieza de trabajo.
25. Experimento de clasificación automática de NUT.
6. Lista de configuración
1. Configuración de la estación de trabajo:
|
Nombre de las piezas |
Modelo |
Número |
Notas |
|
brazo del robot |
ZK-BOT303ED |
4 |
Capitán 340mm, 42 motor + reductor secreto |
|
caja de control |
Caja de control ZK-BOT303ED |
4 |
Contiene MCU, tubo eléctrico, placa de accionamiento, todo tipo de botones |
|
control PLC |
LED control ZK3U PLC |
1 |
Contiene PLC, fuente de alimentación. Placa adaptadora |
|
Línea de comunicación de control principal del PLC |
|
1 |
Comunicarse con otros brazos robóticos |
|
pantalla táctil |
pantalla en color de 4,3 pulgadas |
4 |
Toque INPUT para cambiar los parámetros |
|
línea de comunicación |
cable de comunicación de 9 patillas 232 |
4 |
Comunicación entre el brazo del robot y la pantalla táctil |
|
sensor de infrarrojos |
Longitud 600mm* Anchura 100mm* altura 100mm |
2 |
Altura ajustable, velocidad 1-3 m/min |
|
Módulo de almacenamiento de artefactos de trabajo |
CDD-4ON |
2 |
Altura según depuración de cajas de prueba |
|
Módulo de luces de alarma |
NO |
4 |
Para alarma de funcionamiento |
|
Módulo de recuento de tubos digital |
YL4-2,3JS |
3 |
Se utiliza para calcular la cantidad total de material y el envío de frutos secos |
|
escala electrónica |
|
1 |
485 comunicación (protocolo modbus) |
|
Mobiliarios de jiggling, y otros mobiliarios |
|
4 |
Agarre los materiales |
|
Módulo visual |
Abrir MV |
1 |
Tuerca de clasificación |
|
Nueces, cajas experimentales |
|
1 |
El tamaño de la tuerca |
|
armario de herramientas |
|
1 |
herramienta de sustitución |
PREGUNTAS FRECUENTES
Q1: ¿se pueden utilizar los brazos robóticos en la industria? ¿Qué funciones pueden ser?
A1: Carga útil máxima 0,5kg , puede ser utilizado en la línea de producción industrial ligera, puede ser utilizado como enseñanza, clasificación, garra a los objetos .
Q2: ¿se puede utilizar como brazo robot para la organización docente o formativa? ¿es compatible con la fuente del lápiz?
A2: Sí, este robot puede cumplir con la enseñanza básica de introducción y aprendizaje. Nuestros ingenieros tienen una amplia experiencia en proyectos de aplicaciones robóticas a gran escala. Sobre la base de esta experiencia, hemos desarrollado un robot de bajo coste adecuado para un funcionamiento y una enseñanza sencillos.
Solo la base soporta API puede ser desarrollada dos veces (coordenadas de unión y coordenadas del mundo), programación de la unidad de programación, contexto multi-robot para controlar. El software de control proporciona labview Host Computer Demo
Q3: Personas que nunca han aprendido la enseñanza de la programación ¿puedes controlar este robot?
A3: No hay problema, la unidad de programación táctil es fácil de manejar
Q4: ¿se puede establecer el ciclo de trabajo y se pueden establecer las coordenadas? ¿la velocidad es ajustable?
A4: Apoyar el ciclo del nodo de movimiento en 150 pasos, puede utilizar la unidad de programación para establecer las coordenadas del nodo de movimiento, y la velocidad de movimiento del nodo y la velocidad general se pueden ajustar en cualquier momento.
Q5:¿puedes proporcionar un documento técnico?
A5:Sí, lo hacemos. Y es inglés.
Q6 ¿Qué idioma soporta tu sistema?
A6 la interfaz de usuario está en inglés .
Q7 ¿Cómo solucionar los problemas al utilizar el producto?
A7 proporcionamos soporte en línea gratuito.
Q8 ¿Cuánto dura su plazo de entrega?
A8 normalmente, son unos 15 días hábiles. Si tenemos robots en stock, podemos enviar inmediatamente.
Q9 ¿hay una función de ahorro de energía?
A9 Sí
Q10: ¿Qué hace el sistema de reconocimiento de peso y qué hacen?
A10: El sistema de reconocimiento de peso incluye a continuación
x4 conjuntos de brazos robóticos ZKbot-303Ed
Escala electrónica X1set
X2 Set 1M cinta transportadora electrónica
X1 ajuste la caja de control principal (que puede contextualizar a otro cuadro de control)
X1 ajuste el sensor fotoeléctrico
X1 establecer cámara visual
Q11: ¿Cuál es la necesidad de trabajo en línea multi-máquina?
A11: Es necesario cooperar con otros equipos de la línea de producción para la detección y agarre por infrarrojos de objetos, escalas electrónicas para identificar clasificación de calidad, carga y descarga por infrarrojos, adecuadas para la cooperación industrial multi-máquina, enseñanza de fabricación inteligente en la escuela, etc.
Nuestra educación brazo robótico
Se carga por debajo de 0,5kgs de 3 ejes y 4 ejes de educación robótica brazo . Cada vez más instituciones educativas están comprando nuestro brazo robótico educativo, que permite a los estudiantes aprender los principios de la ciencia, la ingeniería, la programación, la inteligencia artificial y la automatización, y mejorar sus habilidades técnicas, el pensamiento, la creatividad, el trabajo en equipo y la resolución de problemas. Ellos les ayudan a avanzar en su futuro camino de carrera.en la actualidad, nuestra empresa produce 3 tipos de armas robóticas para la enseñanza, por favor, consulte los siguientes parámetros.



 Complaint
Complaint















